资讯




18家顶尖具身智能力量集结,RoboChallenge打造全球最大具身模型竞技场
RoboChallenge完成第二批生态扩容,新增8家头部企业,进一步强化算力、仿真、硬件与算法协同能力。平台已累计超4万次真机测试,构建从提测到结果发布的评测闭环,并通过Table30 V2提升任务难度,推动具身智能评测标准化、国际化与真实场景落地。

仿生外骨骼肌腱可自主调节力道,相关研究登上《Science》子刊
香港中文大学与港科大团队在《Science Advances》提出仿生外骨骼肌腱ExoTendon,模拟高尔基腱器官实现实时力感知与闭环调控,破解人工肌肉“只会发力不会感力”的难题。该技术可刺绣成智能肌腱布,抗干扰、可扩展,并在中风患者髋关节外骨骼中显著提升低输入下的步态平衡与行走表现。

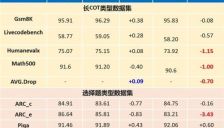
阿里开源Qwen3.6-35B-A3B:30亿激活参数实现编程能力跨越式升级
阿里千问开源MoE模型Qwen3.6-35B-A3B,以350亿总参数、30亿激活参数实现高效推理,在多项编程基准中超越Qwen3.5-27B并领先前代模型。其多模态与空间感知能力同样突出,已接入Qwen Studio与百炼API,展现“小参数、高智能”在智能体编程落地中的关键价值。

Science Robotics:深度域适应技术大幅降低外骨骼数据标注成本
佐治亚理工在《Science Robotics》提出基于CycleGAN的深度域适应框架,以生物力学模拟传感器为“桥梁域”,将开源人体数据迁移到外骨骼控制任务中,将高成本标注数据需求降低95%。在多任务与实机测试中,半监督/无监督模型仍实现接近最优性能,并显著降低代谢成本,验证了方法的工程实用性。

谷歌开源医疗AI模型MedGemma 1.5:从识别平面图像到理解3D影像
谷歌开源MedGemma 1.5,核心突破是从2D走向3D医疗影像理解,支持CT/MRI、病理全视野切片、胸片定位及多时点病情对比,并显著提升电子病历解析能力。在参数规模不变下,多项指标大幅提升,展现高效医学多模态潜力,但仍需面向具体临床场景进行微调落地。

蚂蚁灵波开源LingBot-Map,突破实时空间感知技术瓶颈
蚂蚁灵波开源流式三维重建模型LingBot-Map,仅用普通RGB摄像头即可实现实时位姿估计与在线三维建图。该模型在Oxford Spires、ETH3D等基准上显著领先,兼具高精度、20FPS实时推理与长序列稳定性,为机器人、自动驾驶和AR等场景提供更可靠的空间感知能力。

具身智能时代的工程基础设施来了 逐际动力开源FluxVLA Engine
文章围绕具身智能落地中的工程化难题,解析逐际动力开源FluxVLA Engine的价值:通过统一配置、标准接口、模块解耦与加速部署,打通数据处理、模型训练、仿真迁移到真机部署全链路,补齐VLA从“模型热”走向“应用化”的基础设施短板。
NVIDIA推出全球首个开源量子AI模型 量子纠错技术提升三倍
本文介绍NVIDIA推出的全球首个开源量子AI模型“NVIDIA Ising”,该模型包含校准与解码两大模块,可大幅缩短量子处理器校准时长,将量子纠错速度提升2.5倍、准确率提升3倍,目前已被多家科研机构与企业采用,为量子计算落地及混合量子-经典系统构建提供有力支持。

蚂蚁灵波科技开源LingBot-Map:支持单摄像头实时流式三维重建
本文介绍蚂蚁灵波科技于4月16日开源的流式三维重建模型LingBot-Map,该模型仅需单RGB摄像头即可实现实时三维重建,采用流式架构,在国际评测中精度表现优异,兼顾高速与长时稳定性,可降低三维感知硬件门槛,推动具身智能等相关领域发展。

Google机器人大脑在13个月内三次进化:架构、能力与落地路径全面升级
文章梳理了Google DeepMind在13个月内推动Gemini Robotics-ER三次迭代的关键进展:从ER/VLA分离架构到“Thinking”机制引入,再到工业读表成功率由23%提升至93%。内容重点分析了模型在具身推理、3D感知、跨本体迁移与机器人落地中的能力跃迁,揭示其从“看懂世界”走向“稳定执行”的技术路径与产业价值。
HiFloat8破解Attention量化困境 赋能大模型长上下文推理
关于HiFloat8:破解Attention量化困境,赋能大模型长上下文推理-资讯中国的文章