资讯

AI“爱马仕”Hermes Agent崛起,GitHub上斩获9W+星标
Hermes Agent 作为 Nous Research 推出的开源智能体新秀,凭借“自我进化”机制与高执行力在 GitHub 斩获 9W+ 星标。文章对比其与 OpenClaw 的路线差异,解析技能自动生成、持久记忆、多模型支持与低成本优势,并展示其在自动化运营、研究决策和编程辅助中的落地价值。

Nous Research回应架构抄袭指控:称“代码骨架完全一致”说法不实并表示从未听说相关指控
围绕 Nous Research 的 Hermes Agent 是否抄袭 EvoMap 的 Evolver 架构,双方爆发激烈争议。EvoMap 列出核心进化循环、三层记忆与经验沉淀机制等多项相似证据,并质疑发布时间线;Nous 联合创始人则否认知情并反驳指控。事件折射出开源 AI 领域技术归属与同质化竞争难题。

腾讯发布混元3D世界模型2.0,可无缝对接游戏工作流
腾讯开源发布混元3D世界模型2.0(HY-World2.0),支持文本、图片、视频多模态输入,自动生成与重建可编辑3D场景,并导出Mesh、3DGS、点云等资产无缝接入Unity与UE。相比1.5版本,2.0在真实感、风格化生成、数字孪生复刻和智能漫游导航上全面升级,显著降低游戏地图与关卡原型开发门槛。

武大文科教授跨界AI,发布首个AI图表智能体,半年项目量增长40倍
文章聚焦武大王琼教授团队推出的“爱图表”,直击传统AI图表“生成即死图、不可控”的痛点,提出“白盒化”可深度编辑方案,在数据准确性、专业渲染与结果可控性上实现突破,并拓展至PPT、大屏、数据卡片等场景。产品上线半年项目量增长40倍,展现AI重塑数据表达与决策效率的潜力。
阿里黑马模型happyhorse-1.0斩获LM Arena视频编辑冠军
关于阿里“黑马”模型happyhorse-1.0斩获LM Arena视频编辑冠军的文章

英伟达发布全球首个开源量子AI模型Ising,主力资金大幅加仓量子科技概念股
本文介绍英伟达发布全球首个开源量子AI模型Ising,该模型包含校准、解码两类核心功能,可大幅提升量子处理器校准与纠错效率,推动量子计算商业化进程。同时提及受该利好影响,A股量子科技板块早盘走高,多只概念股领涨,罗博特科获主力资金大额净流入。

异构机器人能共享技能吗?北大清华港中深联合攻关 IAIL意图对齐框架登上Science子刊
关于异构机器人能共享技能吗?北大清华港中深联合攻关,IAIL意图对齐框架登上Science子刊的文章

AI交互新突破:Skywork AI发布Matrix-Game 3.0,实现720p 40帧实时高清世界生成
Skywork AI团队发布Matrix-Game 3.0,在交互式世界模型领域实现重大突破。该系统首次在720p高清分辨率下达到40 FPS的实时视频生成速度,并通过相机感知记忆检索机制攻克了AI视频生成的长效记忆难题。凭借海量3A游戏数据注入和深度推理优化,Matrix-Game 3.0在保持高画质的同时实现了极低延迟,为机器人训练、XR及沉浸式娱乐提供了关键技术支撑,标志着AI正式迈入实时构建可交互世界的新阶段。
研究人员推出LPM1.0模型,实现单图转实时交互式数字人视频
LPM1.0模型实现了通过单张参考图像生成实时交互式数字人视频。该模型支持多模态输入,具备精准唇形同步与自然情绪表达,可与ChatGPT等AI集成实现实时视觉对话。凭借核心技术,它能即时驱动多种风格角色且无需二次训练。该研究标志着AI交互正向具备情感响应与视觉具身化的全维度形态演进,具有重要的科研价值。

华为昇腾0Day支持MiniMax M2.7,开启模型自我进化时代
本文介绍了华为昇腾AI基础软硬件实现对MiniMax首个自我深度迭代模型M2.7的0Day同步支持。MiniMax M2.7具备强大的Agentic能力,能通过自我循环实现研发工作流自动化,在编程和专业办公领域表现优异。华为昇腾通过通信加速和算子融合等技术优化,消除了算力瓶颈,为该“自我进化”模型的落地应用提供了坚实的国产算力底座支持。

阿里通义 CoPaw 官宣更名为 QwenPaw:深度整合“千问”生态,桌面 Agent 开启进化新阶段
开源桌面Agent工具CoPaw发布1.1.0并更名为QwenPaw,正式纳入通义千问开源生态。文章梳理其品牌愿景与优势:全平台接入、支持本地/云端一键部署与自由接入本地模型,并展望端云结合、大小模型协同、安全机制升级及多智能体协作的演进方向。

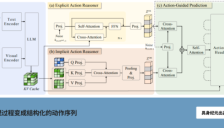
Cyborg and Bionic Systems:面向工具操作的触觉肌电假肢动态操作技能学习
本文介绍了北邮联合清华、武科大团队在SCI1区期刊发表的触觉肌电假肢研究成果,针对工具操作动态场景提出融合多模态信号的TKE-BGC仿生控制框架,可有效降低冲击导致的抓握失稳风险,提升假肢操作稳定性与效率,为截肢患者提升生活独立性、重返职场提供技术支撑。

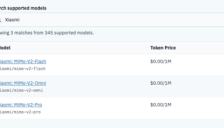
国产Agent生态加速发展:小米MiMo-V2接入顶级框架Hermes,推出14天限时免费体验
小米宣布自研大模型 Xiaomi MiMo-V2 系列正式接入顶级开源 Agent 框架 Hermes Agent,开发者更新至最新版即可在 Nous Portal 调用 MiMo-V2Pro/Omni/Flash 三款模型。文章解析其 1M 长上下文、全模态感知与原生工具调用优势,并介绍 4/8-4/22 两周不限量限免政策与生态意义。

腾讯发布HY-Embodied-0.5具身模型:22项评测中16项最佳刷新行业纪录
腾讯Robotics X与混元团队发布具身基础模型HY-Embodied-0.5,面向机器人三维感知与物理交互痛点重构架构与训练范式,推出MoT-2B与MoE-32B两款模型。依托超1亿条具身数据及多阶段后训练,22项评测16项夺冠,并在实机打包、堆叠等任务中优于主流基线,推动大模型落地物理世界。