资讯

阿里通义千问正式开源Qwen3.6-27B,编程能力实现“以小博大”表现
阿里云正式开源270亿参数模型Qwen3.6-27B,其编程能力实现跨级飞跃,在多项基准测试中超越了15倍规模的MoE模型。该模型原生支持图像、视频等多模态输入,并深度适配主流编程助手与开发者工作流。通过降低部署门槛与提升推理效率,Qwen3.6-27B旨在为开发者提供更精准的编码辅助与视觉推理体验。
小米MiMo-V2.5启动公测:4.3小时手搓编译器,长程智能体能力实现“满分”突破
本文介绍小米MiMo-V2.5系列大模型开启公测的相关信息,涵盖其Pro版本在编译器开发、长程智能任务上的顶尖性能表现,全模态能力、Token效率优势,平台配套的计费优惠政策,以及模型后续即将开源的规划,展现小米在AI大模型领域的快速迭代实力。

小米发布MiMo-V2.5大模型系列,正式开启公测
本文介绍小米于4月23日发布的MiMo-V2.5系列大模型,该系列包含四款模型,核心版本面向全球开源。其中Pro版支持百万级Token上下文,长复杂任务能力媲美顶尖闭源模型;标准版全模态能力优异且API成本降低50%,配套升级的计费方案也进一步降低开发者使用门槛。

Science子刊发表“运动学智能”,有望破解机器人换机需重头教技能难题
针对机器人“演示学习”中技能难以跨平台迁移的痛点,Science Robotics近日发表了关于“运动学智能”的研究。该研究通过对机器人关节空间奇异点的拓扑分析,将物理约束转化为内部控制逻辑,使机器人能深刻“认识”自身结构。这一方案实现了技能在不同型号、不同自由度设备间的无缝迁移,为机器人快速部署提供了可解释的安全框架。

Tacchi 2.0发布:低计算成本的视觉触觉动态接触仿真器
Tacchi 2.0是由方斌教授与张建伟院士团队研发的低成本视觉触觉动态仿真器。它通过结合物质点法(MPM)与相机模型,实现了从物理形变到图像生成的完整链路,支持按压、滑动与旋转等动态接触模拟。该仿真器在分类与滑动检测任务中展现了出色的Sim-to-Real零样本迁移能力,有效解决了高质量触觉数据获取难的瓶颈,可作为插件集成于各类机器人仿真平台。

智源发布业内首个开源世界模型与VLA框架VISTA
本文围绕智源联合多校提出的开源“世界模型+VLA”框架VISTA,解析其如何通过“视觉subgoal+文本子任务”的分层协同,突破传统端到端VLA在OOD场景中的泛化瓶颈。文章对比π0.7技术路径,并结合真机实验展示VISTA以少量数据实现高成功率的关键价值与落地意义。

自变量机器人发布全球首个世界统一模型,35天后新一代机器人入驻真实家庭
自变量机器人发布基于世界统一模型(WUM)的具身智能基础模型WALL-B,突破传统VLA架构在信息损耗与泛化能力上的瓶颈。文章聚焦其原生多模态融合、物理规律理解与家庭场景落地路径,并宣布35天后新一代机器人将入驻真实家庭,推动机器人从“演示智能”迈向“可用智能”。

月之暗面正式发布 Kimi K2.6 模型,多项指标对标全球顶尖大模型
月之暗面正式发布旗舰大模型Kimi K2.6,在编程能力、长程任务及多Agent协作方面实现显著跨越。该模型在多项权威基准测试中表现优异,多项指标对标全球顶尖模型。K2.6不仅支持Mac本地化部署并大幅提升推理效率,其创新的Agent集群架构更支持多达300个智能体并行作业,能高效完成从深度搜索到全链路内容生成的复杂任务。
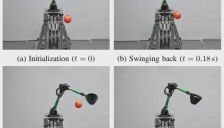
全球首个肌肉驱动机器人成功实现Sim-to-Real迁移并完成真实环境验证
文章深入探讨了全球首个肌肉驱动机器人成功实现Sim-to-Real迁移的里程碑式成果。针对气动肌肉与肌腱传动中极端复杂的非线性动力学难题,研究团队提出广义执行器网络(GeAN),抛弃传统扭矩传感器,仅凭位置轨迹即可精准建模。该技术在四自由度机械臂上完成了高难度动态任务的零样本部署,填补了柔性机器人从仿真到现实的核心技术空白,为未来安全高效的人机共融机器人发展奠定了坚实基础。


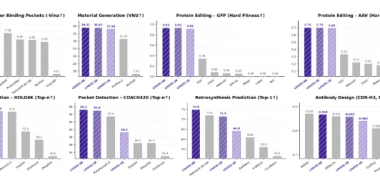
上海AI实验室发布创新ViraHInter模型 提升抗病毒药物研发效率
关于上海 AI 实验室发布创新 ViraHInter 模型,提升抗病毒药物研发效率的文章

国产大模型Qwen3.6-35B-A3B正式开源,聚焦高效率与多模态思考能力提升
国产大模型Qwen3.6-35B-A3B正式开源,该模型采用创新的MoE架构,实现350亿总参数下仅需激活30亿参数的极致推理效率。其在编程、Agent任务及多模态思考方面表现优异,尤其在空间分析和复杂逻辑处理上极具优势,且已深度兼容主流Agent框架,是开发者本地部署高性能AI底座的理想选择。

Moonshot AI联合清华大学发布PrfaaS架构,破解大模型算力瓶颈
Moonshot AI与清华大学联合发布了PrfaaS(预填充即服务)架构,旨在破解大模型推理中的算力瓶颈。该架构通过解耦预填充与解码阶段,将计算密集型任务卸载至专用集群,并配合双时间尺度调度机制优化资源利用。实测显示,该方案可提升54%的服务吞吐量并显著降低延迟,为未来跨地域算力网络的构建和AI工业化应用奠定了坚实的技术基础。
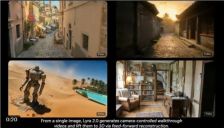
NVIDIA 开源 Lyra 2.0:单张图片可生成可行走 3D 世界,解决长视频“空间遗忘”和“时间漂移”问题
NVIDIA Research正式开源Lyra 2.0框架,实现从单张图片生成大规模、可自由探索的3D世界。该框架通过空间记忆机制和自增强训练策略,有效解决了长视频生成中的“空间遗忘”与“时间漂移”难题。Lyra 2.0支持实时渲染与机器人仿真,能生成高质量的3D高斯溅射或网格模型,为物理AI、游戏开发及虚拟环境构建提供了高效的资产管道。
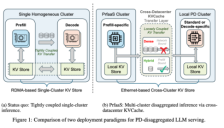
Moonshot AI与清华大学提出跨数据中心PrfaaS创新架构
本文介绍了 Moonshot AI 与清华大学提出的 PrfaaS(预填充即服务)架构:将大模型推理中的预填充与解码阶段跨数据中心解耦,借助专用计算集群与以太网传输 KVCache,突破传统同中心部署瓶颈。研究显示该方案可将吞吐量提升54%,并通过分层路由与双时间尺度调度降低延迟、提升资源利用率。

AI与机器人联手应用于颌面创伤急救 手术时间缩短31% 并发症减少42.3% 术前规划仅需4分钟
文章介绍了HoloTrauma 3X在颌面创伤急救中的突破:通过“视觉模型+大语言模型+机器人”三元协同,将传统近50分钟的急诊手术规划压缩至约4分钟,并在多机构大样本验证中实现更高精度。临床数据显示其可显著缩短手术与气道救治时间,降低术中并发症,提升急危重症救治效率与预后。