外骨骼机器人要真正走进日常生活,最大的拦路虎是什么?
不是硬件成本,也不是控制算法,而是获取高质量训练数据的高昂成本。
一项佐治亚理工学院的研究团队发表在国际顶级期刊《Science Robotics》的研究,试图利用深度域适应框架解决这个痛点。据悉,他们提出的方法能够将外骨骼专用标注数据的需求量减少95%,同时保持接近最优模型的控制性能。
这项研究的核心创新在于:利用开源生物力学数据集,通过模拟传感器作为"跳板域",将无需外骨骼设备的人体运动数据转换为可用于实际设备的训练数据。
01.
数据获取成本:外骨骼研发的最大痛点
要训练一个基于深度学习的外骨骼控制器,研究人员通常需要在实验室环境中收集大量数据。这个过程需要昂贵的动作捕捉系统、测力台等专业设备,还需要受试者穿戴外骨骼执行各种任务。
每次硬件迭代或传感器调整,之前收集的数据容易作废,需要重新收集。更麻烦的是,外骨骼必须在数据收集时就处于驱动状态,因为辅助力会显著改变使用者的生物力学特征。
研究团队认为,传统方法收集一个完整数据集需要数百小时的专业人力,这严重制约了外骨骼技术的发展速度。
为了解决这个问题,团队提出了一个创新的框架:将人体生物力学建模领域的模拟传感器作为通用域,用于聚合各种数据源。
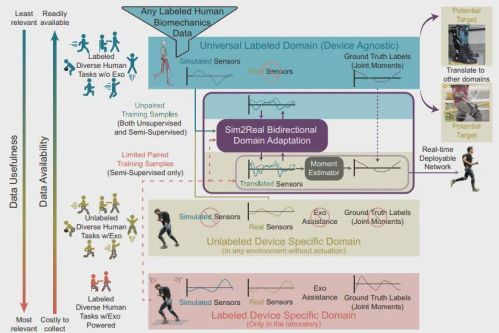
这个框架的核心思路是利用三种不同成本级别的数据源:
最便宜的是开源生物力学数据(源域),这些数据不需要外骨骼设备,但包含了地面反作用力和关节力矩等标签信息。通过OpenSim等生物力学建模软件,可以模拟出虚拟的传感器信号。
中等成本的是未标注的外骨骼数据(目标域),只需要让受试者穿戴未驱动的外骨骼执行各种任务,无需昂贵的实验室设备。这些数据可以在任何环境中收集。
最昂贵的是带标签的外骨骼数据,需要在配备动捕系统和测力台的实验室中收集,但在新框架中,这类数据的需求被大幅减少。
02.
双向域适应:让模拟与现实无缝对接
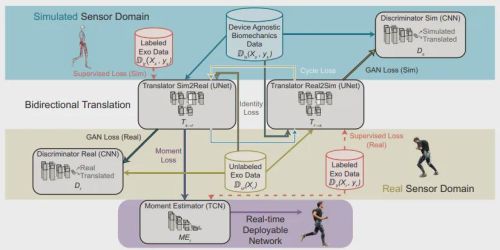
研究团队开发的核心技术是一个基于CycleGAN的双向域适应网络。这个网络使用U-Net作为生成器骨干,能够在模拟传感器域和真实传感器域之间进行双向转换。
网络训练采用了多个损失函数的组合优化策略。除了标准的GAN损失确保生成数据的真实性,还引入了循环一致性损失,确保数据在两个域之间转换后能够还原。对于半监督情况,还加入了少量配对数据的监督损失。
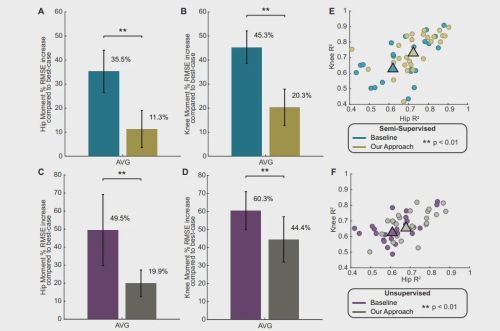
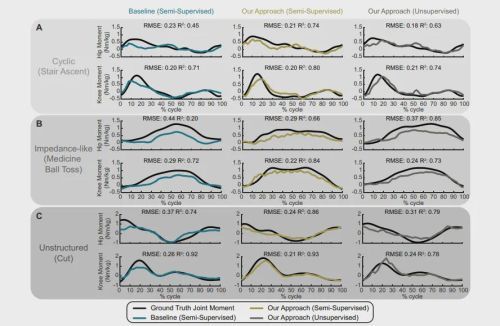
在离线测试中,研究团队在8名新受试者执行28项任务的数据上进行了验证。结果显示:
半监督方法(仅使用4名参与者的4项任务作为标注数据)相比最优模型,髋关节力矩估计误差仅增加11.3%,膝关节增加20.3%。而不使用域适应的基线方法,误差分别高达35.5%和45.3%。
完全无监督方法(不使用任何标注的外骨骼数据)的表现同样显著,髋关节和膝关节的误差增加控制在19.9%和44.4%,远优于基线方法的49.5%和60.3%。
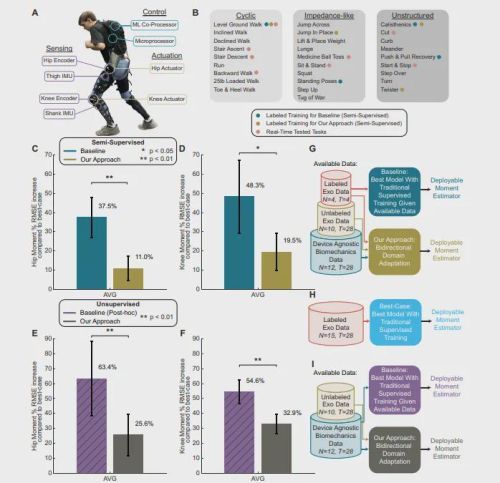
这些模型能够成功部署在实时控制系统中。研究团队使用了一款自主研发的髋/膝外骨骼进行实机验证,该设备配备了髋膝编码器和大腿小腿IMU传感器。
03.
实际应用验证:代谢成本降低超10%
理论性能固然重要,但外骨骼的最终价值在于能否真正帮助使用者。研究团队通过代谢成本测试验证了新方法的实用性。
在举重任务中,使用半监督模型训练的外骨骼控制器能够降低12.5%的代谢成本,接近使用完整数据集训练的最优模型(14.4%)。即使是完全无监督的模型,也实现了9.5%的代谢成本降低。
在5度斜坡行走任务中,半监督模型实现了14.6%的代谢成本降低,与最优模型的13.6%相当。无监督模型同样表现出色,降低了13.8%的代谢成本。
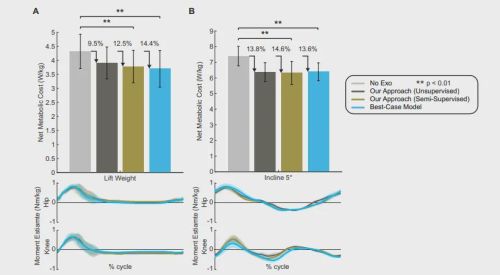
这些结果表明,即使大幅减少标注数据的使用,通过域适应技术训练的控制器仍能提供有效的运动辅助。这种程度的代谢成本降低已经达到了当前最先进控制器的水平。
研究团队还对不同类型的任务进行了细分分析。在周期性任务(如行走、爬楼梯)、阻抗类任务(如举重、深蹲)和非结构化任务(如转弯、躲避障碍物)中,新方法都表现出了稳定的性能。
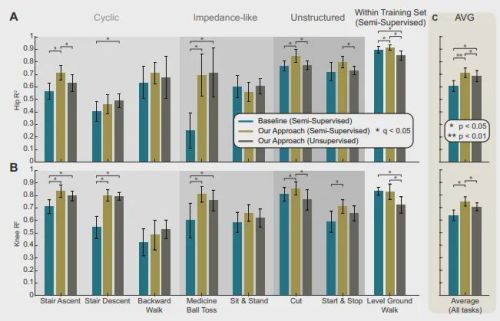
此外,该框架不仅适用于关节力矩估计,研究团队还成功将其应用于地面反作用力估计和活动分类任务,都取得了显著的性能提升。
这项突破性研究展示了深度域适应技术在外骨骼控制领域的潜力。通过巧妙利用生物力学仿真作为"桥梁域",研究团队成功地将开源生物力学数据转换为可用于特定设备的训练数据。这不仅意味着研究人员可以大幅减少昂贵的实验室数据采集工作,还为将外骨骼技术推向更广泛研究人群提供了新思路。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.ads8652