资讯

英伟达推出新一代多模态模型,智能体效率提升九倍
英伟达发布开放式多模态模型 Nemotron 3 Nano Omni,将视频、音频、图像与文本推理整合到统一系统中,凭借混合专家架构实现最高9倍吞吐提升,并在文档解析、视频理解等任务中表现领先,展现出智能体应用的广阔前景。
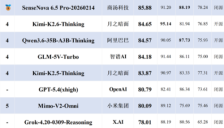
中文视觉大模型竞争格局生变:豆包领先,国产实力全面反超
SuperCLUE-VLM最新测评显示,中文视觉大模型竞争格局生变:字节豆包以90.66分登顶,超越谷歌Gemini,阿里、商汤、智谱等国产模型也整体表现亮眼。文章同时指出,国产模型虽在基础认知与数据分析上领先,但在视觉推理和专业应用场景仍有提升空间。
商汤发布原生理解生成统一模型 SenseNova U1,告别插件式 AI
商汤正式发布并开源原生理解生成统一模型 SenseNova U1,基于 NEO-unify 架构打破传统多模态“插件式拼接”方案,实现语言与视觉在单一框架下统一理解、推理与生成,推动国产AI向更高效、更自然的结构化演进。

阿里巴巴发布创新癌症AI模型,助力肠癌筛查
阿里巴巴达摩院联合医院发布肠癌筛查AI模型DAMO COCA,基于“平扫CT+AI”在2.7万份影像中实现86.6%敏感性、99.8%特异性,并识别出漏诊病例。该无创方案利用常规体检CT提升筛查接受度,助力早期发现肠癌、降低误诊漏诊风险。
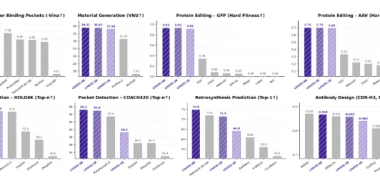
中国科学院发布“磐石100”模型体系,推动AI for Science平台化演进加速
中国科学院发布“磐石100”模型体系,以磐石科学基础大模型为底座,构建覆盖数学、物理、材料、生命科学等八大学科的模型集群与智能体平台。体系实现从基础模型到应用智能体的全栈联动,提升跨学科推理与多模态理解能力,已在多家单位落地应用,推动AI for Science平台化与科研范式变革。

国地中心发布VTouch研究成果,赋能新一代具身实训场建设与模型进化
国地中心发布全球首个超6万分钟跨本体视触觉多模态操作数据集“白虎·VTouch”,并同步公开处理脚本与使用指南。研究提出视觉-触觉-姿态统一对齐与跨模态检索框架,打通数据、训练到真实部署闭环,显著提升机器人精细操作的泛化与落地能力。

DeepSeek-V4爆火背后:北大开源框架One-Eval如何终结AI测评“噩梦”
本文聚焦DeepSeek-V4发布后北大DCAI团队10小时完成自动化评测的案例,解析开源框架One-Eval如何以自然语言智能体、全链路可追溯与人工在环机制,破解大模型评测中的高门槛、黑盒与数据污染难题,并揭示评测产业“诊断+数据补全”的商业闭环及开源带来的行业变量。

日本团队研发蛇形机器人滚动前进新模式,能效提升10倍
大阪公立大学团队提出蛇形机器人“滚动前进”新方法:通过首尾成环与重心转移让重力驱动运动,并结合SAC深度强化学习与观测缓冲区,实现近直线控制。实验证明其曲率半径、速度与旅行效率显著提升,功耗近减半,平坦地面能效可达传统蜿蜒的2-10倍,为低能耗机器人控制提供新思路。


灵光App上线“图生世界”功能,基于蚂蚁灵波开源世界模型LingBot-World-Fast
蚂蚁集团灵光App上线“图生世界”功能,首次将世界模型引入移动端。用户仅需上传一张图片即可生成并漫游60秒的3D世界。核心驱动力为开源模型LingBot-World-Fast,支持16fps实时生成与极低延迟交互。该模型不仅提升了普通用户的AI互动体验,也为具身智能训练和游戏开发提供了高效的虚拟环境方案,目前已在主流社区完整开源。

蚂蚁灵波开源世界模型LingBot-World-Fast,实现实时交互体验
蚂蚁灵光App上线“体验世界模型”,用户仅需上传一张图片即可在手机端生成60秒3D世界并以第一人称实时漫游。其核心为开源LingBot-World-Fast,480P下达16fps、交互延迟低于1秒,并通过后训练优化提升实时生成效率与时序一致性,支持本地部署与二次开发,面向具身智能、游戏与内容创作。

腾讯推出具身多模态大模型 HY-Embodied-0.5-X,赋能机器人智能交互
腾讯正式推出并开源具身多模态大模型 HY-Embodied-0.5-X,该模型专为机器人智能交互优化。通过 MoT-2B 和 MoE-32B 两种架构,实现了端侧实时响应与复杂任务处理的平衡。模型在空间推理、长程规划及精细操作方面表现优异,结合高质量自采数据与思维链标注,大幅提升了机器人在真实环境中的执行能力,为家庭服务等应用场景提供了强有力的技术支持。
亚毫米级精准对位:小米开源VLA大模型后训练全流程
小米正式开源视觉-语言-动作(VLA)大模型 Xiaomi-Robotics-0 的真机后训练全流程。该模型凭借仅20小时的任务数据训练,即可实现亚毫米级的精准对位,完成耳机收纳等复杂操作。此次全链条开源涵盖模型权重、技术报告及源代码,旨在降低具身智能开发门槛,加速高精度 AI 机器人在生产生活中的应用落地。

国产芯片再突破 5nm龙鹰二号正式发布 AI算力达200TOPS
芯擎科技正式发布自主研发的5纳米车规级AI座舱芯片“龙鹰二号”。该芯片算力高达200TOPS,原生支持7B以上大模型,并采用前瞻性的“柔性架构”实现舱驾融合与物理隔离安全保障。作为国产高端车载芯片的重大突破,它将有效降低整车架构复杂度,加速智能汽车向中央计算时代演进,为国产化算力方案提供强力支撑。
腾讯QClaw迎来大升级:接入DeepSeek-V4-Pro,AI专家能力可“开箱即用”
腾讯云 Agent 平台 QClaw 发布 v0.2.14 重大版本更新,接入 Hermes 框架并支持 DeepSeek-V4-Pro、混元 Hy3、KIMI 等多款顶级大模型。此次升级推出内置超百位行业专家的“专家广场”,实现 AI 能力开箱即用。配合微信小程序的远程管理与语音交互功能,极大降低了用户构建与使用 AI Agent 的门槛,提升办公效率。

小米开源VLA大模型后训练全流程,推动机器人实现亚毫米级操作能力
小米公布并开源VLA大模型Xiaomi-Robotics-0真机后训练全流程,聚焦解决机器人落地“最后一公里”。机器人仅用20小时任务数据强化训练,即实现连续收纳耳机等亚毫米级精细操作,兼顾高精度对位与实时纠偏稳定性,降低高性能机器人任务开发门槛,推动复杂场景应用加速落地。