资讯

Genesis AI 单模型实现打蛋弹琴,机器人界迎来ChatGPT时刻
Genesis AI 近日发布了首个机器人基础模型 GENE-26.5,该模型能自主完成打蛋、解魔方、弹钢琴等多种高难度任务,无需人工干预,标志着通用机器人技术在处理非结构化任务上的实质性突破。凭借全栈自研和快速训练能力,项目获得1.05亿美元种子轮融资,预示机器人技术可能很快进入真实世界应用。

腾讯发布OpenSearch-VL开源多模态深度搜索智能体综合方案
腾讯混元联合多机构发布了OpenSearch-VL,这是一个完全开源的多模态深度搜索智能体方案。通过强化学习技术,它创新性地开发了数据生产线、多元化工具环境和故障感知算法,解决了高质量训练数据缺失的瓶颈,使模型能主动搜索和推理。实验表明,OpenSearch-VL在多项基准测试中表现优异,媲美顶级商业模型,并全量开源以推动多模态AI研究的发展。
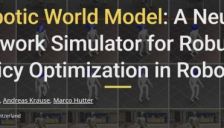
苏黎世联邦理工学院让机器人学会"想象":零样本部署四足和人形机器人
ETH苏黎世研究团队开发了RWM(Robotic World Model)框架,通过神经网络模拟器让机器人在虚拟环境中“想象”动作,实现零样本部署到真实硬件。该框架采用双重自回归机制解决误差累积问题,使用GRU架构提高预测效率,并结合特权信息训练策略。实验表明,ANYmal D四足机器人和Unitree G1人形机器人能精确执行速度跟踪任务,无需在线微调,显著提升了机器人学习的样本效率和部署安全性。


削皮、切片、探测表面,瑞士团队用扩散场让机器人学会操作曲面物体
瑞士洛桑联邦理工学院团队提出'扩散方向场'方法,利用点云数据和扩散方程为机器人创建平滑的局部坐标系,解决曲面物体操作难题。该方法能实时处理变形物体,集成到遥操作、轨迹规划和强化学习中,提升任务效率和鲁棒性,为机器人处理复杂曲面提供通用解决方案。

Inworld AI 推出实时 TTS-2:一款适应用户交流方式的闭环语音模型
Inworld AI 推出了实时 TTS-2,这是一款创新的闭环语音模型,能够实时捕捉用户的语调、节奏和情感状态,提供更自然的对话体验。通过闭环系统架构,TTS-2 不仅将文本转换为音频,还能理解上下文和情感变化,支持跨语言一致性和灵活的语音设计。该模型通过语音指令、对话意识等功能,提升了语音AI的连贯性和真实感,旨在在竞争市场中脱颖而出。

交互感知连续体机器人,哈工大团队首创微创内耳手术新范式——获登Nature子刊
哈工大团队研发交互感知连续体机器人系统(DS-MDCR),首创经自然腔道的微创内耳手术新范式。该系统通过双段连续体机构、内窥镜和力感知微针协同,在狭窄耳道内实现精准药物注射和采样,突破传统手术创伤大的局限。成果发表于《自然·通讯》,为内耳疾病治疗开辟精准干预新路径,有望推动治疗模式升级和早期干预发展。

全球27国526支战队参与巅峰竞技,AGIBOT WORLD CHALLENGE @ ICRA 2026线上赛成绩揭晓
AGIBOT WORLD CHALLENGE @ICRA 2026线上赛成绩公布,吸引全球27国及地区526支队伍参赛。赛事首创“推理—操作”与“世界模型”双赛道,并通过真机数据、仿真平台与标准化评测体系,推动具身智能与机器人世界模型评测标准走向国际化。

帕西尼1个月发布3款触觉传感器,再度展现全球具身感知龙头姿态
文章聚焦帕西尼在1个月内连续发布3款触觉/力觉传感器,重点介绍超薄SLIM系列在1mm厚度、400点/c㎡测力密度、多维感知等方面的突破,并解析其以硬件、数据、模型协同构建具身感知生态与行业护城河的战略价值。

无需人类遥控,机器狗仅靠“看”和“学”通过模仿动物实现敏捷奔跑新突破发表于《Nature Communications》
文章介绍南京大学团队发表于《Nature Communications》的四足机器人研究:机器狗通过模仿真实狗的运动数据学习自然步态,并结合纯视觉感知与分层神经网络控制,在陌生随机障碍赛场中实现自主判断、跑跳切换和高成功率通关,展示了生物启发机器人控制的新进展。
腾讯开源超轻量离线翻译模型,手机端运行仅需0.4GB内存
腾讯混元团队开源超轻量离线翻译模型Hy-MT1.5-1.8B-1.25bit,将33种语言翻译能力压缩至约440MB,可在手机端断网运行。文章重点介绍其量化压缩技术、实测性能、隐私优势及多场景落地价值。

《Science》发布一项基于拓扑学的微型机器人研究:会“解扣起跳”的绳子刷新跳跃极限
《Science》最新研究展示了一种基于“复合纤维+绳结拓扑”的微型机器人驱动方案:通过解结瞬间释放储能,实现超高跳跃、翻转、旋转与回旋飞行,并拓展到空中自播种等应用,为软体机器人运动控制提供了全新范式。
3万小时垃圾数据训练出10亿参数机器人大脑,性能提升48%
文章介绍北大、清华等团队推出的10亿参数机器人基础模型LDA-1B,核心创新在于利用30000小时异构“低质量/失败”数据联合学习策略与动力学规律,并在接触密集、灵巧操作和长时程任务上实现最高48%的性能提升,展示了机器人训练从依赖专家演示转向高效数据利用的新方向。
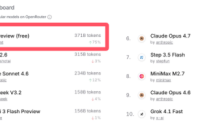
国产大模型混元Hy3 Preview登顶全球大模型调用量榜单
OpenRouter最新榜单显示,腾讯混元Hy3 preview登顶全球大模型API调用量总榜,并在工具调用与编程场景中表现突出。文章聚焦国产大模型海外影响力提升,以及行业从参数竞争转向应用实效竞争的新趋势。

从融合世界模型到演生类脑架构,“中国特斯拉”为何能在VLA主航道上持续领航?
文章围绕VLA是否已过时的行业争议展开,解析智平方提出的技术路线:从端到端VLA,到融合世界模型的增强型VLA,再到类脑架构NeuroVLA。文中强调世界模型并非替代VLA,而是补强其预测、规划与执行能力,并展示类脑分层结构在动态稳定、快速反射和低能耗上的突破价值。

蚂蚁集团百灵大模型Ling-2.6-flash正式开源,智效比提升十倍
蚂蚁集团正式开源百灵大模型Ling-2.6-flash,提供BF16、FP8、INT4等多种量化版本,兼顾高性能与低部署门槛。该模型在推理速度、智效比及Agent任务能力上表现突出,可为开发者和企业带来更高效、更低成本的大模型应用方案。