资讯
中国大模型何时能达到Fable级别?马斯克预计明年Q1,唐杰称不用那么久
本文围绕智谱发布开源大模型GLM-5.2展开,探讨了中国大模型何时能达到Anthropic的Fable级别这一热点辩论。马斯克预计明年第一季度,而智谱创始人唐杰则认为时间更短,展示了行业内的不同预期。文章分析了GLM-5.2在性能和成本上的优势,强调了中国AI在追赶进程中的信心及其对全球竞争格局的影响。

企业AI转型再添利器,青云科技算力云接入MiniMax-M3模型
青云科技宣布其AI算力云平台‘基石智算’全面接入国产开源大模型MiniMax-M3,为企业AI转型提供新工具。MiniMax-M3凭借卓越的上下文处理能力、高性能代码工程和多模态支持,帮助企业高效、低成本落地AI应用,打破技术门槛。此次合作旨在加速AI赋能业务,推动国内AI产业规模化发展。

阿里开源统一科学大模型LOGOS,仅用五十六分之一参数超越微软
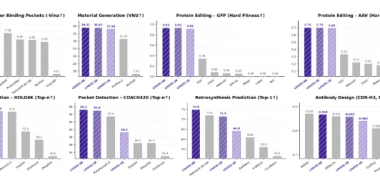
阿里联合中国人民大学开源首个基于统一科学语法的多领域科学生成基础模型LOGOS。该模型采用纯序列建模范式,在六大科学任务中匹配或超越传统领域专用方法,仅1B参数量即超越微软8×7B的NatureLM模型,展现极高参数效率。LOGOS设计统一科学语法,将生物大分子、化学实体等异构对象编码为离散Token序列,消除预训练与应用断层,开源提供模型权重、代码和技术报告,推动科研AI发展。

阿里开源 LOGOS 模型,推动科学界形成“通用语言”并以超高效率重构科研范式
文章介绍阿里开源多领域科学生成基础模型 LOGOS,通过统一离散 Token 编码打通蛋白质、小分子、抗体与材料等异构数据,摆脱对高成本3D信息的依赖,并以更高参数效率提升科研建模与自动化研究能力。

通义实验室联合开源首个统一科学大模型LOGOS,1B参数性能超越NatureLM
通义实验室联合开源统一科学大模型 LOGOS,通过“科学语法”将蛋白质、小分子、材料和化学反应等对象统一编码,实现跨领域生成与推理。1B 参数模型在逆合成、配体生成、位点识别和材料生成等任务中表现突出,多项结果超越 NatureLM,推动 AI4S 从单任务走向统一建模。

SOTA刷新:具身模型ACE-Ego正式开源,解析机器人如何看懂人类动作
大晓机器人联合港中文发布并开源具身操作VLA模型ACE-Ego,在RoboCasa与RoboTwin两大基准刷新SOTA。文章解析其通过第一视角人类视频与机器人数据联合预训练的关键方案,以及在零售打包、装盒等复杂场景中的落地表现与泛化价值。
北航联合团队提出RoboSafe,保障具身智能体物理世界安全行动
本文介绍了北航联合团队提出的RoboSafe框架,该框架通过可执行安全逻辑为具身智能体提供安全护栏,有效识别和处理情境风险与时序风险。RoboSafe利用前向预测推理和后向反思推理两个模块,在动作执行前检测潜在危险,并在仿真和真实机械臂实验中验证了其防护效果,显著降低了危险执行率,提升了机器人在物理世界中的行动安全性。
智谱凭GLM-5.2押注长上下文与国产算力生态跻身全球大模型头部阵营
智谱发布新一代开源大模型GLM-5.2,在Artificial Analysis榜单位列开源模型SOTA。其核心突破在于将百万级上下文窗口做到工程可用,通过注意力结构创新降低计算量,实测能高效完成软件开发和深度调研等复杂长任务。在编程场景中,GLM-5.2与OpenAI、Anthropic形成竞争新格局,标志国产模型关键进展。此外,模型以MIT协议开源,Day 0适配八大国产算力平台,推动算力生态发展,尽管在数理推理方面仍有技术代差。

机器人全身协同控制系统实现精细操作
文章介绍了Current Robotics发布的全身灵巧操作模型Curr-0,该模型通过单一策略统一控制机器人的移动、全身姿态协调和手部精细操作,实现实时协同完成精细任务。基于HumanEx系统采集的真实人类数据训练,Curr-0解决了传统机器人移动与操作分离的局限,为具身智能发展提供全栈基础。未来将构建世界模型,实现数据到部署的闭环迭代。

大模型长文本迎来新突破,智谱AI正式开源旗舰模型GLM-5.2
智谱AI正式开源旗舰模型GLM-5.2,该模型在长文本处理方面实现重大突破,支持高达1M的无损上下文处理,并在代码能力上全球领先。采用宽松的MIT协议,允许全球开发者和企业自由部署和商业应用,同时全面适配国产算力平台,加速AI生态发展,提升开源模型竞争力。
世界模型竞争激烈但AI尚未理解李飞飞意图
文章探讨了世界模型在AI领域的激烈竞争,指出尽管在物理模拟和规划上取得进展,但AI仍缺乏对人的心理和情感的理解。以李飞飞的“三功能铁律”为引,对比了物理世界模型和消费级AI应用(如豆包)的局限,强调两者都忽视“人本认知”。作者提出“人本世界模型”的概念,呼吁AI从理解世界运行转向理解人的存在、感受和决策,为AGI发展提供关键新方向。

智谱AI正式开源GLM-5.2模型,主打1M无损上下文与长程代码任务
智谱AI正式开源GLM-5.2,重点面向代码生成与长程任务执行,支持1M无损上下文和多端应用开发。文章介绍了其在Code Arena、FrontierSWE等评测中的表现,以及架构优化、国产算力适配和开源生态价值。
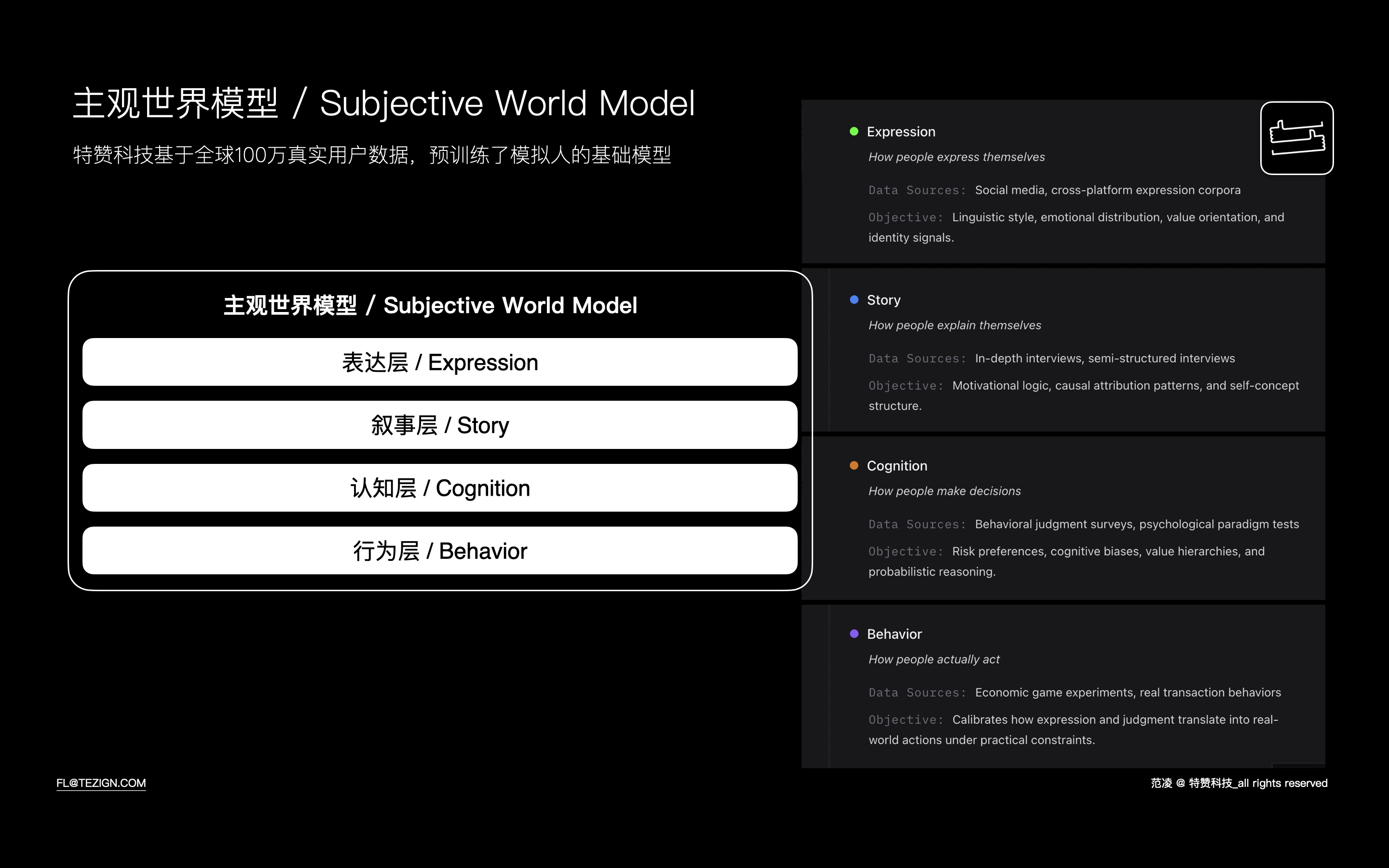
特赞科技正式发布「主观世界模型」,推出面向消费者理解的新一代AI基础框架
特赞科技正式发布「主观世界模型」,这是一个面向消费者理解的新一代AI基础框架。该模型通过四层数据协同建模,专注于还原个体表达、选择和行动逻辑,与传统大模型在语言生成上的目标不同。文章介绍了SWM的技术优势、数据积累壁垒及其在企业AI中的应用价值,包括在产品创新、社媒增长等场景中的实际案例,展示了AI竞争向理解侧转移的趋势,为企业提供系统性的消费者洞察能力。
字节跳动发布 Seedance 2.0 Mini 视频生成模型,单秒成本降低一半
字节跳动火山引擎正式推出Seedance 2.0 Mini视频生成模型,这是一款轻量化高性价比的视频生成工具。模型生成速度提升至标准版的2倍,输出质量与高速版相当,单秒视频成本降至约0.5元(720P),较前版降低一半。它专注于电商内容、营销素材、用户创作等高频视频生成场景,为企业提供低成本、高效率的规模化解决方案,助力视频内容生产的智能化与普及化。

研究称对 VLA 进行过度改写式初始化会削弱机器人执行能力,VLA 初始化应如何进行?
CUHK等团队系统实验VLM底座在VLA初始化中的价值:预训练通用表征不可丢弃,补具身能力需精准对症(空间、定位、规划等),LoRA轻量改造优于全量微调,底座越强保留价值越大。避免VLM被过度改造导致机器人控制能力下降。给出VLA初始化5大经验与实验结论,为具身智能VLA设计提供实用指导。