资讯
CPU重返数据中心核心地位 某国内大模型厂商CPU需求提高5倍
随着AI向智能体时代迈进,CPU在数据中心中的角色日益重要,正重返现代AI基础设施的中心。文章探讨了CPU需求增长的原因,如某国内大模型厂商需求提高5倍,CPU与GPU配比从传统的1:8向1:4、1:2甚至1:1变化。同时,芯片巨头如英特尔和英伟达正推出新品,抢占市场机遇,预示着数据中心CPU的快速增长和行业竞争的加剧。

G0.5机器人开始实现边想边动
本文介绍了Galaxea G0.5技术报告中的新型Vision-Language-Action模型,该模型通过自回归方式将视觉理解、语言指令、推理规划和动作生成统一在一个序列中,实现机器人'边想边动'的智能控制。它创新性地解决了动作token爆炸问题,支持跨机器人泛化,提升了实时性和任务执行效率,为机器人智能发展提供了新方向。

四川大学华西医院团队研发新型脊柱微创手术机器人系统MicroSpine,3根2毫米机械臂从侧前方进入绕至脊柱后方
四川大学华西医院团队研发的MicroSpine脊柱微创手术机器人系统,通过三根外径仅2毫米的机械臂集成在8毫米套管内,具有18个高自由度。该系统能从腰椎侧前方进入狭窄椎间隙,弯曲绕至脊柱后方,实现直接神经减压,解决了传统手术中器械难以触及后方病变的难题。它采用CPPR结构平衡灵活性和刚度,减少手术创伤和出血,为腰椎退行性疾病治疗提供创新方案,论文发表于《Science Robotics》。


阿里巴巴宣布升级大模型组织架构,成立Token Foundry事业部及AI未来研究院
阿里巴巴宣布对AI业务进行重大组织架构升级,合并通义大模型与未来生活实验室,成立Token Foundry事业部,并设立AI未来研究院。此次调整由集团CEO吴泳铭直接负责,周靖人出任首席科学家,专注于前沿AI研究。这标志着阿里在AI战略上的持续加码,通过工程落地与前沿研究的双轨并行机制,加速将技术领先优势转化为商业化动能。技术方面,Qwen-3.7模型全球领先;商业方面,AI业务已进入回报周期,体现了阿里在AI领域的系统化推进和长期价值。
UCLA将触觉灵巧手做成开源套件,成本3000美元组装约3小时
UCLA的RoMeLa实验室发布了MIDAS Hand,一个全开源的触觉灵巧手项目。它以约3000美元的成本和3小时组装时间,提供了一个低成本、易于复现的机器人手。MIDAS Hand集成触觉传感器,采用直驱结构,支持抓取操作、遥操作和仿真。所有设计文件和工具链开放,旨在降低触觉灵巧手的研究门槛,推动机器人技术发展。

首次纯人类视频预训练VLA实现灵巧操作,少量数据微调即可部署成功
该研究首次提出使用纯人类视频预训练视觉-语言-动作(VLA)模型,实现机器人灵巧操作。通过VITRA框架,自动从人类活动视频中提取3D手部运动轨迹、分割原子动作并生成语言指令,构建了超大规模数据集。预训练模型展现出强大的零样本手部动作预测能力,仅需少量真实机器人数据微调,即可在真实环境中高效部署,对新物体和环境泛化能力强,显著降低了机器人学习的数据获取成本。
ICRA2026:北邮本科生一作提出TransTac传感器,融合透明触觉与视觉
TransTac传感器首次在单个设备中融合透明视觉观测与高精度触觉重建,解决了机器人近接触感知盲区。通过紫外编码透明弹性体、轻量化标记检测网络和先验引导的Delaunay立体匹配,它在近场提供可靠深度信息,误差稳定在2.44mm。实验显示,其触觉图像可被视觉语言模型零样本识别,准确率达83.3%,远超传统传感器,为机器人交互提供新可能。

2026张江EAI-张江具身智能开发者大会聚焦从世界模型到物理交互,探索具身智能产业化新路径
本文聚焦具身智能领域从世界模型向物理交互的产业化转变,诚邀参加2026张江EAI-张江具身智能开发者大会。大会将于6月16-17日在上海张江举办,围绕世界模型、数据基座、机器人技术等议题,深入探讨具身智能如何跨越虚拟到物理的链条,推动技术落地和产业协同,为行业提供新路径和交流平台。

大晓机器人发布全球首个全屋生成个体级物体全交互模型Kairos-HomeWorld,加速仿真世界机器人训练
大晓机器人联合香港中文大学等机构发布Kairos-HomeWorld模型,这是全球首个实现全屋生成和物体全交互的世界模型统一框架。该技术突破室内场景生成瓶颈,能一键生成结构连贯、物理合理的全屋三维场景,并同步开源大规模中国家庭3D数据集,包含30万套真实户型,为具身智能提供高保真训练环境,降低研发成本,加速机器人在中国市场的规模化普及。

国内开源AI智能体Runtime框架MateClaw发布v1.5.0更新,推动工作流工程化
近日,开源AI智能体Runtime框架MateClaw发布v1.5.0版本,重点将工作流推向工程化。本次更新聚焦于提升Agent在真实团队运行中的基础设施,核心包括引入目标验收清单机制实现任务透明化、升级知识引擎增强知识库一致性维护、以及启用多用户记忆隔离保障隐私安全。这些改进解决了行业痛点,提高了AI智能体的可靠性和生产力,加速其工业级应用落地。

Notion澄清Anthropic模型下线传闻:仅为技术性故障,禁用12小时后已全面恢复
Notion 官方宣布因 Anthropic Claude AI 模型的技术性基础设施故障,曾临时禁用相关服务约12小时,现已全面恢复。Notion 和 Anthropic 澄清此次事件是暂时的技术中断,而非模型质量问题。该事件揭示了 AI 生产力工具依赖外部大模型时的稳定性脆弱性,以及用户对服务可用性要求的提升,对 AI 商业化中模型迭代与基础设施高可用性平衡提出了重要课题。

大晓机器人开源中国户型3D数据集,Figure AI面临新竞争
大晓机器人联合港中文和深圳河套学院发布Kairos-HomeWorld模型,开源全球首个专为中国家庭打造的全屋3D数据集,包含30万套真实户型和5000个可交互仿真场景。该模型支持文本到全屋场景的一键生成,使机器人能高效完成跨房间家务任务,显著降低具身智能训练成本,加速家庭机器人在中国市场的规模化落地。相比Figure AI的实景训练,其虚拟仿真方式提升了效率,为中国机器人发展提供关键数据底座。
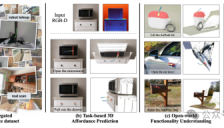
机器人在11个数据集上取得SOTA,同时具备视觉和运动能力
AFUN模型通过整合语言理解、图像分割和三维点云处理,实现了机器人的可供性感知能力,使其能同时识别操作区域并规划三维运动轨迹。该模型在11个数据集上取得SOTA成绩,并在真实机器人任务中达到90%成功率,解决了机器人学中长期存在的‘看’与‘动’分离问题,为自主操作部署迈出关键一步。

定标准、建生态、促行业,AGIBOT WORLD CHALLENGE在ICRA 2026圆满收官
AGIBOT WORLD CHALLENGE 2026 作为 ICRA 2026 的官方赛事,成功吸引全球27个国家和526支顶尖团队参与。赛事通过Reasoning to Action和World Model双赛道,结合线上标准化评测与线下真机验证模式,依托智元自研的开源数据和仿真平台,解决了行业评测不统一和仿真与真机脱节等痛点。它不仅推动了具身智能技术标准化和产业化落地,还通过全栈工具链降低研发门槛,成为该领域的技术标杆和生态构建者。

博通引发美股芯片板块大跌 SpaceX启动IPO路演
本文报道科创板早报核心内容:博通因AI芯片销售指引低于预期,引发美股芯片板块集体下跌,涉及美光、AMD等公司;SpaceX启动IPO路演,预计每股135美元,拟在纳斯达克上市。同时涵盖工信部推动6G技术创新、高端光纤预制棒价格暴涨近550%,以及英伟达推出全模态物理AI模型NVIDIA Cosmos 3。文章为投资者和科技爱好者提供及时的市场动态和行业趋势分析。