机器人感知新纪元:CoRMA如何让机器真正理解接触
PART 01
在机器人精密装配领域,成功攻克了最后一道技术难关。
在工业制造领域,机器人已经能够成功完成搬运、抓取和分拣等任务,然而,真正决定制造自动化上限的,往往不是“拿起物体”,而是在接触过程中完成装配。无论是连接器插接、齿轮啮合、精密零件压配,还是复杂螺纹旋合,机器人都必须在接触发生后的毫秒级时间尺度内,持续判断自身究竟处于未接触、首次接触、侧向擦碰、导向滑移,还是卡滞失配状态,并据此实时地调整位姿、力和动作策略。Factory、IndustReal、FORGE 等工作已经反复证实,接触富集装配是机器人学习中最为困难且最具工业价值的方向之一。对于人类而言,这种能力源自于触觉、经验以及对“接触语义”的直觉判断;而对于机器人来说,这一直是被行业公认为难题,因为微小的几何误差、摩擦变化、柔顺性差异、感知偏差和执行延迟,都可能在接触瞬间被放大成卡滞、错位甚至不可恢复的失败。近期,赛索德智能(Synthoid.ai)团队正式公开了预印本论文《CoRMA: Contrastive RMA for Contact-Rich Meta-Adaptation》,该研究团队与香港大学祝建桥教授共同署名。该工作提出了一种面向接触式装配的上下文元自适应框架,旨在使机器人不仅仅“碰到物体”,而是第一次真正开始“理解接触”。
PART 02
机器人首次学会“理解接触”
传统机器人在进行高精度装配任务时,常常依赖于任务专用的建模方式、状态机的切分策略、人工设定的阈值以及参数的反复整定过程,或者是针对单一工艺场景进行定制化的开发。如果零件、夹具、目标位姿、接触摩擦或者柔顺性等条件发生改变,那么装配的成功率就可能迅速下降。CoRMA所提出的关键变化在于:机器人不再试图去记住一个庞大且难以部署的环境参数表,而是去学习一个更为抽象、也更具可复用性的接触语义表示,并把“接触到底在表达什么”作为核心的适应对象。在 CoRMA 框架中,这个表示被具体实现为一个 6 维的 semantic contact context。它所刻画的并不是简单的“有没有力”这一状态,而是包括接触起始、侧向接触、导向过渡、两个方向上的接触偏置,以及 jam / stick-slip 倾向等多个方面。换句话说,系统实时回答的并不是一个单一的物理量,而是一组对于控制真正具有意义的问题:当前是否已经发生接触、接触是从哪个方向发生的、系统是否已经进入导向滑动状态、是否存在卡滞风险、当前偏差是在被纠正还是在被放大,以及下一步更为合理的动作修正应该是什么。论文中特别强调,力觉本身只是一种证据,而这个 6 维 latent 才是对该证据的语义解释。这件事的重要性在于,它使得看似不同的任务,第一次拥有了同一套“接触词汇表”。在过去,机器人往往为每一种装配工艺单独训练一套控制习惯;而在 CoRMA 的视角下,不同任务之间真正值得共享的,并不是表面几何,而是接触发展过程中的共性结构。这也是它最值得强调的创新之一:它把装配问题从“每个任务各学各的”状态,推进到了“在相关任务族内共享一套接触语义接口”的层面。
PART 03
从“看见世界”到“感知世界”
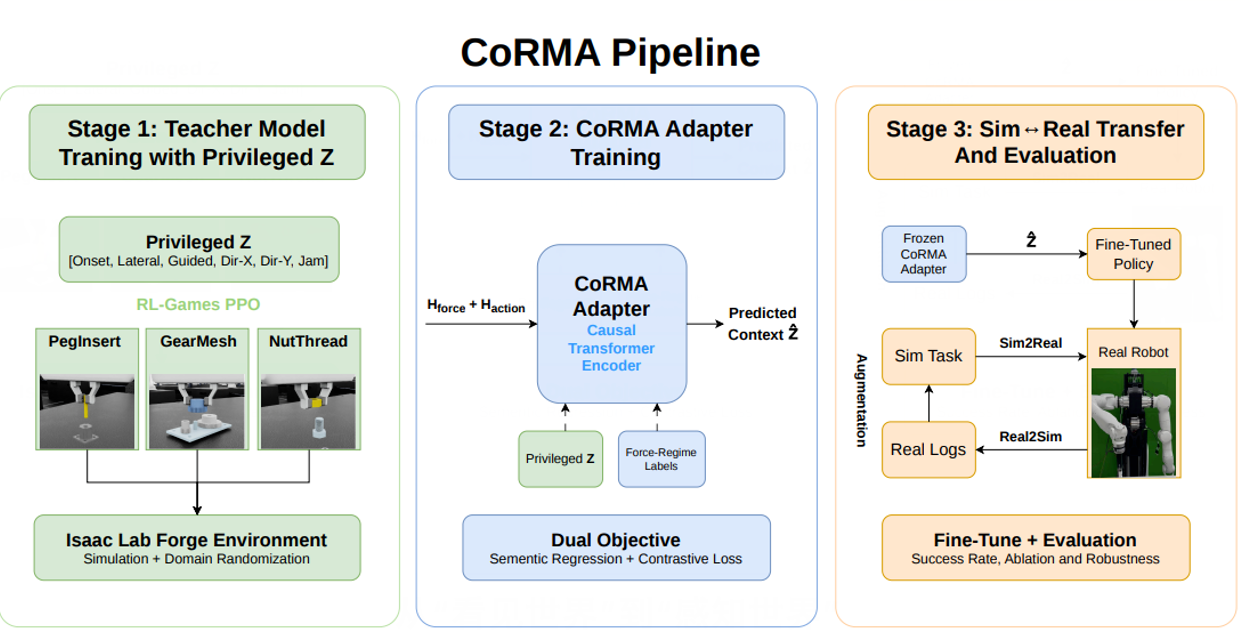
CoRMA的另一个关键创新,体现在它把部署时可获得的多模态信号,成功组织成了一种可在线推断的接触上下文。该系统融合了力/力矩、本体感知以及动作历史等信号,并且不依赖于人工示范、不依赖于测试时梯度更新,同时也不要求部署阶段能够访问模拟器中的特权信息。其核心的adapter采用了causal Transformer作为时序编码器,并配备了两个头:其中,一个语义头直接回归6维接触上下文;另一个对比头则运用force-regime InfoNCE方法,将自由运动、首次接触、导向滑移以及jam等粗粒度接触状态,组织成更为清晰的表征结构。换言之,机器人并非仅仅依赖一个瞬时的测量值来进行判断,而是从连续的历史数据中,理解接触过程正在如何演化。从元学习的角度来看,CoRMA真正具有价值的地方,体现在它将“快速适应”从测试时的参数更新过程,成功转化为部署时的接触上下文推断。传统MAML类方法强调借助少量梯度更新来适应新任务;RL²将快速学习过程隐含在recurrent state之中;而PEARL和variBAD则把适应过程理解为对latent context或任务不确定性的在线推断。CoRMA沿着这一脉络,在工业装配场景中提供了一个更贴近真实部署的解决方案:机器人无需在现场进行重新训练,也不依赖额外的示教,而是借助部署过程中可获得的力觉、本体感知以及动作历史,持续判断当前的接触状态,并基于此调整后续动作。对于制造业而言,这里所说的“小样本”意义,并非完全零训练,也不是在每一个新产品上重新学习一套策略,而是尽可能减少在真实产线上所需的额外数据采集、人工示教、反复调参以及测试时参数更新。

CoRMA 借助共享的接触语义表示以及适应接口,使得相关任务得以围绕同一类"接触理解能力"开展迁移与复用工作。这使得 CoRMA 不仅仅是一个单任务强化学习的产物,而更像是一种面向接触装配场景的跨域适应思路:让机器人能够在不同任务之间复用对接触过程的理解能力。更进一步地,CoRMA 指明了一个值得深入探索的方向:未来机器人进行跨任务复用的对象,并不一定必须是完整的动作策略本身,也可以是更为上层且更为稳定的"接触语义适应机制"。当前的研究工作已经表明,不同任务所产生的历史片段,可以依据接触状态而非任务身份来进行组织与分类。这意味着,CoRMA 不仅仅是一个新的方法,更像是在提出一种全新的工业具身智能范式:首先学会对接触进行统一解释,随后让不同任务共享这种解释能力。
PART 04
仿真到真实世界的跨越

为了验证 CoRMA 是否真正具备面向工业场景的适应能力,研究团队并未局限于单一装配任务或理想的仿真环境,而是主动选择了多类典型的高难度接触装配任务来开展测试,其中包括 PegInsert 精密插销装配、GearMesh 齿轮啮合装配以及 NutThread 螺纹旋合任务。之所以选择这些任务,是因为它们分别代表了工业装配中几类最常见且最难自动化的接触问题:插入任务考验机器人对微小位置偏差的修正能力,齿轮啮合考验机器人对离散接触和匹配关系的判断能力,而螺纹旋合则考验机器人在长时间持续接触中的稳定控制能力。这些任务并非简单的“到点运动”,而是要求机器人在接触过程中持续进行感知、判断与调整。实验结果表明,CoRMA 并不依赖于“仿真成绩特别好”来证明其有效性,相反,其真正的价值恰恰体现在缩小仿真到现实的性能下降上。在 PegInsert 任务中,FORGE 的仿真成功率高达 98.75%,但其真实验证成功率仅为 12.5%;相比之下,CoRMA 的仿真成功率为 60.0%,但真实验证成功率却达到了 50.0%。在 GearMesh 任务中,CoRMA 的真实验证成功率为 65.0%,显著高于 FORGE 的 25.0%;而在更困难的 NutThread 任务上,CoRMA 达到了 59.3%,但 FORGE 在相同验证规则下仅为 0%。换言之,CoRMA 最重要的并非将仿真分数进一步提高,而是将“看起来学会了”转变为“真正能在真机上更稳定地实现”。CoRMA 在真实机器人上的表现提升,并非偶然现象。其背后的关键在于,使机器人不仅仅依赖于某一个瞬间的力觉数据,而是理解一段连续的接触过程。
在精密装配过程中,许多问题并非瞬间出现;例如,零件刚刚接触到边缘、开始沿孔壁滑动、逐步进入导向阶段,或者即将发生卡滞等状态,通常需要综合前后一段时间内的力觉反馈、本体感知信息以及动作变化,才能够被准确判断出来。CoRMA 运用了 causal Transformer adapter 来对这类长时序信息进行处理,从而使机器人能够从连续的接触历史中,判断出当前所处的接触状态类型。论文的实验结果也对此进行了验证:在6维接触语义预测任务中,CoRMA的causal Transformer adapter表现显著优于传统的Conv-style RMA adapter,其平均R²值从0.4336提升至0.8792,这表明它更擅长捕捉装配过程中连续、细微且具有阶段特征的接触变化。此外,CoRMA还引入了force-regime contrastive objective,以帮助模型对不同接触状态进行更清晰的区分。简而言之,该方法使系统能够认识到:自由运动、首次接触、导向滑动以及卡滞并非相同情况;即使这些状态源自不同任务,只要其接触含义相似,就应当在表示空间中彼此接近。通过这种方式,机器人所学到的便不再局限于某一特定任务的动作经验,而是更为通用的接触理解能力。因此,CoRMA性能的提升并非仅仅源于模型规模的增大,而是得益于更为合理的学习机制:让机器人从连续接触历史中识别当前发生的情况,并将这一判断应用于后续动作调整。这也正是它能够在真实装配任务中表现更为稳定的重要原因。
PART 05
面向下一代智能制造
随着制造业持续向柔性化、小批量、多品种以及快速换型的方向演进,工业机器人所面临的核心挑战,已经不再局限于“能否按照设定轨迹运动”,而是扩展到“能否在真实装配过程中,对位置误差、零件公差、接触扰动以及工况变化进行有效应对”。在传统产线当中,许多精密装配任务都高度依赖于人工经验、反复调试过程以及工艺定制工作。一旦产品型号、夹具状态或零件批次发生任何变化,机器人通常都需要重新进行参数调整,甚至不得不重新开发整套工艺流程。这正是为什么诸如连接器插接、齿轮啮合、螺纹旋合以及精密压装等环节,长期以来仍然是自动化落地进程中最难以攻克的部分。CoRMA 的核心价值,正是使机器人在接触过程中得以具备更强的现场实时判断能力。它并非单纯地让机器人记忆某一个产品、某一个动作或某一套固定参数,而是引导机器人学会识别接触过程中的关键状态:包括是否已经接触、是否发生偏移、是否进入导向、是否存在卡滞风险,以及下一步应当如何修正动作。换句话说,机器人不再仅仅是“执行动作”,而是开始根据真实的接触反馈信息做出相应调整。这对于工业客户而言显得尤为重要。这是因为在真实产线环境当中,零件并不会始终处于理想位置,摩擦、装配间隙、夹具误差以及定位偏差也往往不可避免。CoRMA 所代表的技术方向,是使机器人能够在这些变化当中保持更为稳定的装配能力,进而减少现场调试时间,降低换型成本,并提升复杂装配任务的自动化成功率。这一技术路线尤其适合那些对微小接触变化高度敏感,并且需要频繁进行跨产品切换的工业环节。
无论是在消费电子领域完成精密插接与压配工作,还是在汽车制造过程中进行齿轮啮合与螺纹旋合作业,抑或是在半导体设备中实现高一致性连接,以及在医疗器械生产环节装配小公差部件,它们共同面临的挑战都已不再局限于“机器人能否按预设轨迹运动”,而是聚焦于“机器人能否在真实工况条件下的接触过程中,理解自身所经历的物理状态与交互意图”。CoRMA所具备的现实意义,便在于它得以将上述这个原本依赖人工经验与反复调试的过程,重构成一种可被算法学习、可跨任务迁移并具备复用潜力的接触语义推断问题。
PART 06
关于Synthoid.ai
Synthoid.ai 正致力于打造面向真实世界的下一代具身智能机器人系统。我们坚信,真正的智能,不仅源自视觉,更依赖于与真实世界之间的持续交互。机器人若要应用于真实的工业现场,便不能局限于“看见”物体的位置与形状,还必须能够在接触过程中解读力的变化、材料的差异、装配阻力以及环境的不确定性。无论是一次轻微的偏移,还是一次细微的滑动,抑或是一次即将发生的卡滞,都是机器人理解现实世界的重要信号。物理智能的价值,正体现在机器人能够真正解读并运用接触反馈来完成任务。对于工业场景而言,这便意味着机器人不仅知晓零件所在的位置,更能够判别是否已经接触、是否发生偏移、是否存在卡滞风险,以及下一步应当如何对动作进行调整。在装配、抓取以及操作过程中,机器人需要融合视觉、力觉、本体感知与历史经验,持续解读当前状态,并在存在误差与扰动的条件下保持稳定执行。
来源:机器人感知新纪元:CoRMA如何让机器真正“理解接触” | 具身研习社