


雷军、王兴联手押注,00后清华特奖博士3个月融资近5亿,世界模型目标全球领先

机器人大讲堂
从OpenAI、英伟达到Figure乃至马斯克Optimus,全球科技圈正在集体押注于“世界模型”。然而,在这场竞赛之中,一支来自中国的年轻团队成功实现了强势突围:由清华00后特奖博士刘松铭所创立的LiberAI(北京将闲科技有限公司),近日宣布其已连续完成了种子轮、天使轮以及天使+轮融资。公司成立仅半年,便在3个月内完成了近5亿元的融资,并由真格基金、红杉中国、美团龙珠、顺为资本等多家头部机构联合押注。
从清华特奖得主到创业新星:一位00后创业者的技

刘松铭的履历可堪称一段传奇。 他不仅荣获了清华大学授予在校学生的最高荣誉——特等奖学金(该奖项每年仅有十名学生能够获得), 而且以第一作者身份在ICML、NIPS等众多国际顶级会议上发表了多篇论文, 早在本科求学阶段就已展现出非凡的学术天赋。 更值得关注的是, 他最初是凭借化学竞赛金牌获得保送资格进入清华大学化工系, 而后出于对计算机科学的热忱, 毅然决然地转入了计算机系。
2023 年顺利从清华大学计算机科学与技术系本科毕业的刘松铭,其学业成绩表现十分突出,GPA 达到了3.99/4.00,在全系215名学生当中排名第一,称其为青年技术天才并不为过。
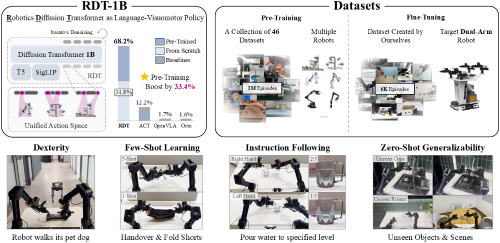
在2024年,刘松铭选择在具身智能领域进行深耕。由他主导研发的RDT-1B,成功成为了全球首个运用大规模预训练与扩散Transformer范式的机器人操作基座模型,比硅谷公司的PI-0模型整整领先了一个月。该模型同时也是目前全球规模最大的机器人操作扩散基座模型,首次实现了跨机器人动作空间的统一表达以及物理知识的迁移,解决了双臂机器人操作中的多模态行为分布与训练数据稀缺难题。
该模型使机器人得以像专业调酒师一般精准地调制鸡尾酒,依次将冰块、椰子酒、橙汁以及菠萝汁倒入杯中,整体动作流畅自然,操作顺序准确无误。
相关成果以论文《RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation》的形式得以发表,同时完成了开源工作,该成果一经发布便登顶了HF具身智能热榜。

更为关键的是,刘松铭并未止步于单纯的技术突破层面。在2025年底正式踏上创业征程后,他仅耗时四个月,便成功发布了全球首个具备高自由度灵巧手精细操作能力的具身智能模型。该模型能够完成双手协同剥香蕉、双手拧开瓶盖、持锅进行颠勺等一系列复杂操作。这些看似日常的动作,对于机器人而言却是难度极高的挑战,其背后需要机器人对操作力度、作用角度以及肢体协调性实现精准无误的掌控。
刘松铭目前正于清华大学攻读机器学习方向的博士学位,自2023年起,他师从清华大学的教授朱军以及苏杭。其研究路径涵盖了物理建模、机器学习以及机器人智能等多个方向,进而成为近两年清华大学年轻研究者群体中备受瞩目的新生代代表之一。
他的创业伙伴同样具备出色的专业能力。其联合创始人林凡淇师从清华大学高阳教授,其研究成果曾获得ICLR会议的口头报告资格,以及CoRL会议X-Embodiment研讨会的最佳论文奖项。这个年轻的团队正以其独特的视角和方法,重新定义着机器人智能的发展路径。
PART 02
从OpenAI、英伟达到Figure乃至马斯克Optimus,全球科技界正将战略重心集体转向“世界模型”。然而,在这场激烈竞赛之中,一支源自中国的年轻团队成功实现了有力的突破。由清华大学00后特奖博士刘松铭创立的LiberAI(北京将闲科技有限公司),近日宣布其已连续完成了种子轮、天使轮以及天使+轮融资。公司成立仅半年时间,便在三个月内完成了近五亿元的融资,并获得了真格基金、红杉中国、美团龙珠、顺为资本等多家头部投资机构的联合注资。
从清华特奖得主到创业新星:一位00后创业者的技术征程
刘松铭的学术经历堪称非凡。他不仅荣获了清华大学授予在校学生的最高荣誉——特等奖学金(该奖项每年仅有十名学生能够获得),而且以第一作者身份在ICML、NIPS等众多国际顶级会议上发表了多篇学术论文,早在本科阶段就已展现出卓越的学术潜力。更值得关注的是,他最初是凭借化学竞赛金牌获得保送资格进入清华大学化工系,而后出于对计算机科学的浓厚兴趣,毅然决然地转入了计算机系。
于2023年从清华大学计算机科学与技术系本科毕业的刘松铭,其学业表现极为突出,GPA达到了3.99/4.00,在全系215名学生中位列第一,堪称青年技术领域的杰出代表。
在2024年,刘松铭选择在具身智能领域进行深入探索。由他主导研发的RDT-1B,成功成为了全球首个运用大规模预训练与扩散Transformer范式的机器人操作基座模型,比硅谷公司的PI-0模型领先了整整一个月。该模型同时也是目前全球规模最大的机器人操作扩散基座模型,首次实现了跨机器人动作空间的统一表达以及物理知识的迁移,解决了双臂机器人操作中存在的多模态行为分布与训练数据稀缺难题。
该模型使机器人得以像专业调酒师一般精准地调制鸡尾酒,依次将冰块、椰子酒、橙汁以及菠萝汁倒入杯中,整体动作流畅自然,操作顺序准确无误。
相关成果以论文《RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation》的形式得以发表并完成开源,该成果一经发布便登顶了HF具身智能热榜。
更为关键的是,刘松铭并未停留在单纯的技术突破层面。在2025年底正式踏上创业征程后,他仅耗时四个月,便成功发布了全球首个具备高自由度灵巧手精细操作能力的具身智能模型。该模型能够完成双手协同剥香蕉、双手拧开瓶盖、持锅进行颠勺等一系列复杂操作。这些看似日常的动作,对于机器人而言却是难度极高的挑战,其背后需要机器人对操作力度、作用角度以及肢体协调性实现精准控制。
刘松铭目前正于清华大学攻读机器学习方向的博士学位,自2023年起师从清华大学的朱军教授以及苏杭教授。其研究路径涵盖了物理建模、机器学习以及机器人智能等多个方向,成为近两年清华大学年轻研究者群体中备受瞩目的新生代代表之一。
他的创业伙伴同样具备出色的专业能力。其联合创始人林凡淇师从清华大学高阳教授,其研究成果曾获得ICLR会议的口头报告资格,以及CoRL会议X-Embodiment研讨会的最佳论文奖项。这个年轻的团队正以其独特的视角和方法,重新定义着机器人智能的发展路径。
LiberAI的核心创新在于其提出了一条全新的技术路线:借助物理世界模型的构建,让机器能够真正理解力、运动、空间以及因果关系之间的联系。这个概念听起来可能有些抽象,但刘松铭用了一个简单的类比来阐明其重要性:过去的机器人模型就像在看图说话,它们知道结果,却不理解背后的原因。而真正的智能则需要理解因果关系——力和接触属于「因」,运动状态属于「果」。
为了实现这一目标,LiberAI方面提出了两项核心技术创新。首先是模态对齐技术,该技术将物理数据与视频数据在因果层面开展深度融合。其中,视频数据承载了物体的运动状态,以此作为“果”;而物理数据则承载了力与接触等核心信息,以此作为“因”。借助这种对齐方式,少量的物理数据便能够撬动海量的视频数据,从而大幅降低了数据成本。
其次则是将物理规律引入其中,以此作为归纳偏置。这一做法相当于把人类千百年来所积累的物理认知注入到模型当中,帮助模型将搜索范围限定在正确的区间之内,从而大幅度地加快了模型的收敛速度。这种方法使得机器无需从零开始对物理世界进行探索,而是能够站在人类既有知识的基础之上实现快速学习。
在数据采集方面,LiberAI选择依托人手交互数据的采集方式,借助第一视角视频来记录人类的操作过程。这种“无感、轻量、高效”的方式不会干扰人类的正常操作,几乎能够覆盖人类可以完成的所有任务,并且数据采集的管理与培训成本趋近于零。
刘松铭认为,真正的物理智能应当具备纠错能力。无论是规划、记忆还是其他智能能力,其本质均归结于纠错能力。模型的纠错水平,直接决定了它与物理世界的GPT-3之间的距离。真正的智能意味着能够认识到自身的错误、及时恢复、明确当前状态,并预判世界的变化。
PART 03
资本持续加码背后:一场面向未来的战略博弈

LiberAI的快速崛起,引起了资本市场方面高度的关注。真格基金、红杉中国、美团龙珠、顺为资本等一线机构的集体下注,不仅是对团队实力所给予的认可,更是对物理世界模型这一赛道前景的看好。
雷军的顺为资本参与此项投资,其逻辑并不令人意外。小米在智能制造以及机器人领域拥有深厚布局,物理世界模型技术有望为其未来产品提供关键支撑。美团的投资逻辑同样明确,作为本地生活服务巨头,美团对能在物理世界自主操作的机器人需求巨大,涵盖外卖配送与餐厅服务等方面。
红杉中国的参与,进一步彰显了顶级资本力量对该技术方向的认可。面向人工智能发展的下一个十年,能够使机器深度理解并有效操控物理世界的一方,将有望成为定义下一个时代的核心力量。
面对外界针对00后创业者在经验积累方面存在的质疑,刘松铭始终保持着清醒的认识。他坦言,投资人所看重的不只是个人能力,而是团队整体实力以及与所选赛道之间的匹配程度。"00后虽然在经验方面尚显不足,但更具开放性,同时也更具冲劲——创业一定是go big or go home的。"公司正在吸引越来越多具备丰富产业经验的人才加入,以此形成优势互补的格局。

刘松铭对于LiberAI的定位并不仅仅局限在一家技术公司的范畴,他指出:“我们所做的工作,其实更接近于一种产品层面的定义——我们希望像苹果公司那样,去为世界模型的数据采集范式、本体架构以及系统框架制定标准。” 这种极具前瞻性的战略愿景,正是能够吸引资本持续加注以及众多顶尖人才纷纷加入的关键所在。
在这场全球竞赛中,以LiberAI为代表的中国力量,正凭借自身的方式对游戏规则进行定义。他们并未选择跟随,而是在无人区中开拓新领域,从而构建与物理模态充分对齐的世界模型。
展望未来,LiberAI的愿景是推动物理AI走出实验室环境,转变为能够切实为人类提供服务的"Physical Agent"。一旦这颗"物理大脑"的Scaling曲线开始呈现陡峭的上升趋势,那可能便是通用机器人步入千家万户,实现实质性突破的时刻。正如刘松铭所指出的:"世界模型的终极目标,是引领人类进入地球Online的简易模式。一个无法烹饪早餐、不擅长处理家务、难以与人类建立长期共存关系的物理AI,并不属于我们所期许的未来。"
物理世界模型领域的竞赛目前才刚刚拉开序幕,然而,LiberAI已经借助实际行动成功证明了,中国的年轻一代正运用最为坚实的技术方法,在AGI真正的无人区中开拓新的疆域。
来源:雷军、王兴联手押注,00后清华特奖博士3个月融近5亿,世界模型剑指全球领先! | 机器人大讲堂










