



具身智能的行业热度,正在从“模型演示”转向“物理落地”。
过去一段时间,世界模型、物理AI、具身数据集、神经仿真器等关键词密集出现,背后指向的是同一个问题:机器人能否在开放、动态、非结构化的真实环境中,形成可预测、可验证、可执行的行动能力。
这一趋势正在被一系列新进展进一步放大。
NVIDIA发布面向物理 AI 的开放世界基础模型 Cosmos 3,打通视觉推理、世界生成、动作预测三大核心能力,成为全球首款完全开放的全模态物理AI模型;智元正式开源AGIBOT WORLD 2026数据集第二期主题“多样交互(Rich Interaction)”,面向世界模型、神经仿真器、物理感知以及表征学习等具身智能研究,系统记录机器人与真实物理世界之间复杂、高密度、非理想的交互过程,旨在补齐当前世界模型训练中长期缺失的真实物理交互数据;李飞飞也进一步提出,世界模型不应停留在“生成画面”,而应走向渲染、模拟、规划三类能力的融合,支撑智能体理解、推演并作用于真实世界。
这些变化表明,世界模型正在从视觉生成概念,进入更深层次的物理理解与行动预测阶段。其关键不只是生成一个看起来合理的世界,而是建立对物理状态、因果变化、行动后果和长期任务的内在表征。
具身智能能否真正走向产业化,关键在于模型能否跨过“虚拟认知—物理交互—任务执行”的连续链条。
很多人关注具身智能,但更值得追问的是:
- 世界模型到底在建模什么
- 从视觉生成到物理模拟,中间缺的是什么
- 机器人要在真实环境中稳定工作,需要怎样的数据、模型和工程闭环
2026张江EAI-张江具身智能开发者大会将于6月16日-17日在浦东张江科学会堂举办。本次大会围绕具身智能前沿研究、世界模型、数据基座、机器人本体、核心部件、快速制造与产业协同等方向展开,把抽象的技术命题放回真实产业现场。
01.
世界模型进入深水区:从视觉生成走向物理可计算
过去,不少被称为“世界模型”的系统,更多停留在视觉生成或场景渲染层面:根据文本、图像或视频生成一个视觉上成立的场景。但对于具身智能而言,仅仅“看起来像真实世界”远远不够。机器人需要面对的是可以被接触、推动、抓取、避障和持续交互的物理环境。
从这个角度看,世界模型的核心并不是生成画面,而是形成对世界状态的压缩表征。它需要理解物体之间的几何关系、材料属性、接触约束、动力学变化和行动后果;也需要在不完整观测下,对环境下一步将如何变化作出预测。
李飞飞对世界模型的重新划分提供了一个清晰框架:渲染器主要负责生成视觉画面,最主要的考核标准是逼真度;模拟器的职责是构建符合物理规则的三维结构;规划器的职责是给智能体下达行动指令。三者看似分立,本质上都指向同一个闭环:智能体观察世界、采取行动、改变状态,再根据反馈继续决策。
这也是具身智能区别于纯语言智能的重要分野。语言模型擅长描述世界,但机器人要进入现实世界,还需要理解世界如何变化、行动会带来什么结果,以及哪些动作在物理约束下真正可执行。世界模型的研究价值,正是在这里从“生成式能力”进入“行动式智能”。
02.
虚实闭环成为关键变量:真实交互数据决定模型边界
世界模型真正难的地方,在于处理真实世界中的不确定性。真实环境很少是干净、稳定、标准化的:物体会遮挡、滑动、变形,地面材质会变化,光照与视角会扰动,人的介入也会不断改变任务条件。
具身智能正在从“仿真驱动”走向“虚实闭环”。仿真环境可以降低训练成本,帮助模型快速探索大量场景;但模型最终能否用于机器人,还取决于它能否吸收真实物理交互中的长尾经验。智元“多样交互”数据集受到关注,正是因为它把机器人与真实物理世界之间复杂、高密度、非理想的交互过程显性化,为世界模型训练补上长期稀缺的真实交互样本。
这类数据的价值,更重要的是让模型理解行动与后果之间的结构关系:推动一个物体会发生什么,抓取失败意味着什么,接触力变化如何反馈到控制策略,任务中断后如何重新规划。没有这类经验,模型很容易停留在视觉合理,却难以形成可执行、可泛化、可持续迭代的物理智能。
从NVIDIA Cosmos 3所强调的视觉推理、世界生成与动作预测,到开放协作联盟所推动的物理AI生态,再到具身数据集向真实交互扩展,可以看到一个趋势:世界模型正在从“生成世界”走向“理解世界、预测世界并参与世界”。这也是具身智能走向产业化必须跨过的门槛。
03.
听会:把世界模型放回产业问题中讨论
如果说世界模型是具身智能的认知底座,那么论坛的价值,是把它从概念热词重新放回技术路线与产业问题中审视。
大会主论坛将围绕具身智能发展趋势、世界模型前沿、数据基座与进化引擎、产业链技术攻关与协同制造等方向展开讨论。议题并不止于“技术是否先进”,更关注它如何进入机器人系统,如何与数据、硬件、场景和制造体系共同形成闭环。
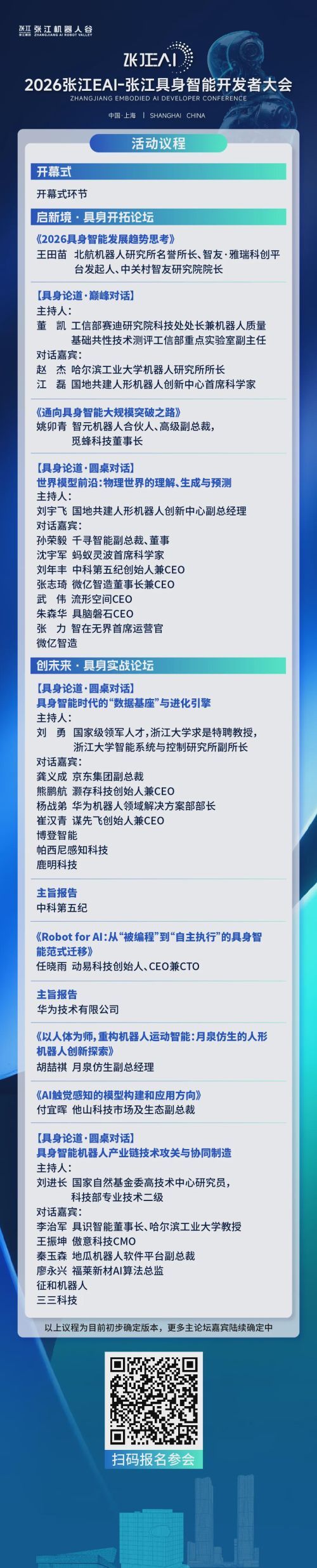
世界模型相关讨论将聚焦物理世界的理解、生成与预测;数据基座相关讨论将回应模型持续进化所依赖的样本、标注、仿真与真实交互;具身实战论坛则进一步连接本体运动能力、触觉感知和工程化应用,形成从认知建模到行动执行的连续视角。
主论坛是一次产业趋势的集中校准:具身智能的发展重点在哪里,整机企业如何突破量产瓶颈,核心部件如何支撑性能提升,供应链平台如何提高响应效率,这些问题都将在现场被集中讨论。
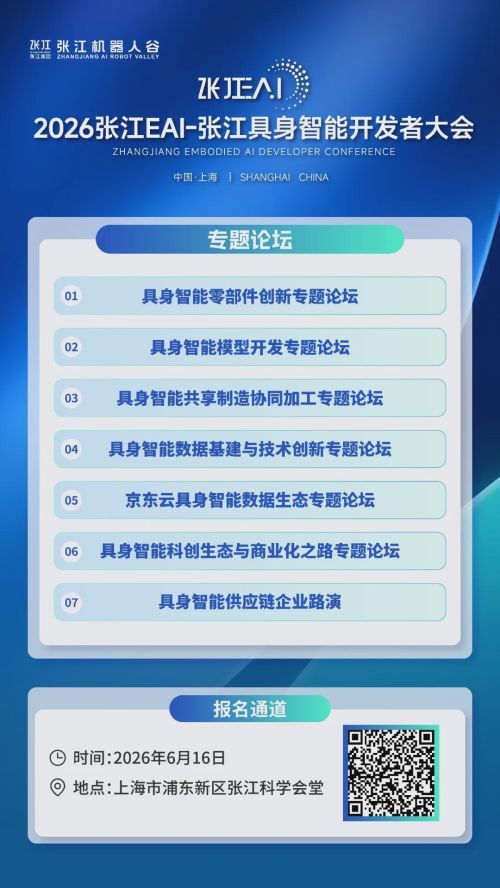
专题分论坛则进一步聚焦零部件创新、模型开发、共享制造等方向,直面企业在研发、制造、验证和交付过程中遇到的实际问题。对于开发者、产业链企业和投资机构而言,这些讨论能够帮助大家更清晰地判断赛道节奏和合作机会。
04.
看展:在真实产品中观察具身智能的落地条件
论坛讨论的是方向,展览呈现的是条件。听完世界模型、数据基座和物理交互的前沿讨论,再进入具身智能创新展,观众可以更直观地看到这些问题如何落到产品和产业链。
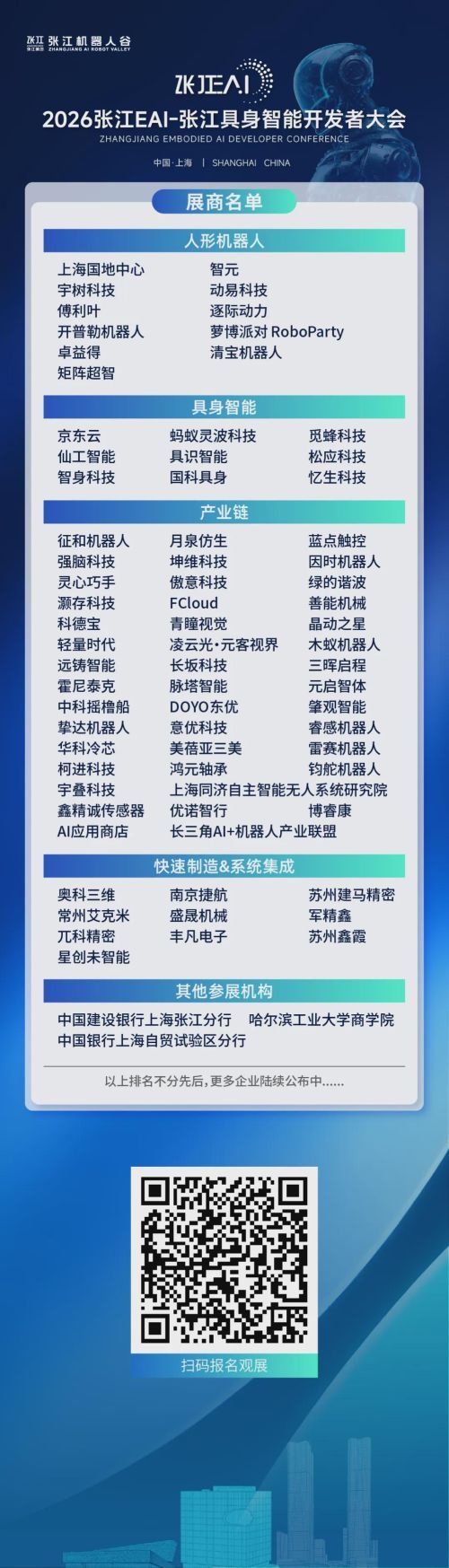
人形机器人、本体、具身智能、核心部件、灵巧操作、触觉感知、快速制造与系统集成,并不是与世界模型无关的“外围环节”。恰恰相反,它们决定了模型能否获得足够可靠的感知输入、能否通过身体执行行动、能否在真实工况中反复验证和迭代。
从这个意义上说,通过展览,观众可以观察具身智能从“模型能力”走向“系统能力”的过程:算法需要身体承载,世界模型需要真实交互校准,任务规划需要执行机构闭环,产业化也需要制造、测试和供应链共同支撑。
05.
来现场:把技术问题、产业条件和合作资源放在一起看
具身智能的产业化不会只发生在论文、视频或发布会上。它需要模型研究者理解真实环境的复杂性,也需要机器人企业、核心部件企业、制造服务商、应用方和资本力量在同一张产业图谱中形成协同。
这也是本次大会对行业观众的价值:一方面,通过主论坛和专题交流,理解世界模型、数据基座、具身大模型和机器人系统的关键问题;另一方面,通过现场展览和企业交流,观察这些技术命题在产品、部件、制造和场景中的实际承接方式。
- 理解世界模型从渲染、模拟到规划的技术演进逻辑;
- 观察真实交互数据、仿真验证与机器人控制之间的关系;
- 近距离了解人形机器人等本体、具身智能和核心部件的最新进展;
- 接触快速制造、系统集成和测试验证等产业支撑能力;
- 与开发者、科研机构、企业、投资机构和应用方建立交流连接。
06.
观众报名开启:6月16日-17日,张江见
6月16日-17日,2026张江EAI-张江具身智能开发者大会将在上海张江科学会堂举办。
如果你关注世界模型、物理AI、具身智能、人形机器人、核心部件、模型开发、快速制造、系统集成、场景应用与产业投资,这场大会值得来到现场。

当世界模型开始走向物理世界,当机器人从实验演示走向产业现场,真正重要的是技术、数据、身体、场景与制造能力能否形成闭环。
欢迎来到张江,把趋势看得更清楚,也把合作连接得更具体。
商务合作咨询:堂博士(同微信)13810423387
观众报名咨询:堂博士(同微信)15611695072














