
“一群巴掌大的微型机器人,在水面上相遇、聚集、离散,它们没有中央指挥官,却在混乱中涌现出精妙的集体行为,甚至能自发推动物体、搭起桥梁。
如果你曾在沙滩上堆过沙堡,一定见过这样的情景:当你不断添加沙粒,沙堆会突然在某个瞬间发生崩塌,大大小小的沙粒滑坡此起彼伏。有趣的是,这些崩塌的大小和频率并不是随机的,小崩塌频繁发生,大崩塌极为罕见,但它们的统计规律却惊人地遵循着一种数学模式。这就是“自组织临界性”(Self-Organized Criticality, SOC)最经典的例子。
自组织临界性被誉为复杂系统的“普适语法”,它可以解释从森林火灾蔓延、地震活动到人脑神经元放电等诸多现象。简单来说,SOC 描述的是一个动态系统无需外部精细调参,仅靠内部个体的局部相互作用,就能自发演化到一个“临界状态”。在这个状态下,系统会产生尺度不变性(Scale Invariance),各种物理量的统计分布呈现出优美的幂律分布。
然而,在完全可编程的人工系统中真正实现这一特性,一直是科学界和工程界面临的挑战。最近来自清华大学的研究打破了这一僵局,研究团队设计了一群水面微型机器人集群(Aquatic Robot Swarm, ARS),它们仅靠发光吸引和水波排斥这两种简单的物理交互,就自发演化出了自组织临界态的全部特征。

相关成果已发表在《Science Advances》上。
01.
会“看”会“推”的水上机器人
研究团队开发了名为“水面机器人集群(Aquatic Robot Swarm, ARS)”的实验平台。每个机器人体积仅80立方厘米,漂浮在水面上。它们主要靠振动移动,机器人两侧对称分布着三层圆形薄膜,薄膜中心的振动电机可以驱动薄膜振动,产生的水波反作用力推动机器人前进。这种运动方式确保了机器人在碰撞或拥堵时不会“卡壳”。
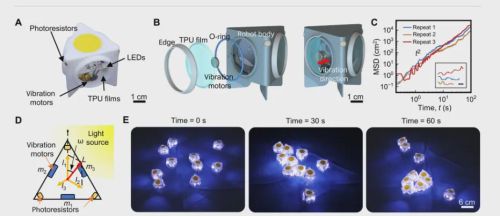
机器人硬件设计与尺寸
机器人“看”世界的方式也很有特色:它们搭载了三个光敏电阻,可以感知同伴发出的可见光方向,从而实现趋光性聚集。同时,振动薄膜产生的水波会形成一种天然的“社交距离”机制,这股水波对邻近的机器人来说,就是一种物理扰动和排斥力,太近了会被推开,从而抑制无限聚集的趋势。
于是形成了一个有趣的反馈回路:光信号让机器人想聚在一起,水波排斥力又阻止它们挤成一团。正是这种长程吸引和短程排斥的局部相互作用,成为了自组织临界性的土壤。
02.
“雪崩”般的聚集行为
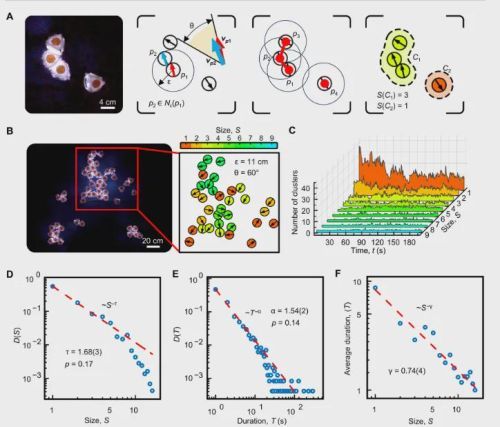
要衡量这群机器人的集体行为,研究团队引入了一个精妙的概念——“相关簇”。如果两个机器人距离足够近(距离小于阈值 ε),且速度方向足够相似(夹角小于 θ),它们就被认为“直接相关”;而这种相关性可以传递,从而将一个个小团体串联成更大的相关簇。这非常类似于图论中的连通分量(Connected Components)算法。
ARS相关簇
实验显示,当64台机器人同时启动,相关簇的大小和持续时间并不是均匀分布的。大多数时候,系统由许多零散的小簇组成,但偶尔也会出现跨越数十个个体的大规模集群,而这种大集群一旦出现便会持续很长时间。统计结果显示,相关簇的大小分布完美符合幂律,幂指数达到1.68;持续时间分布也同样是幂律,指数为1.54。这意味着,无论你从哪个尺度去观察这个机器人群,它都展现出完全一致的统计特征,也就是时空尺度不变性。
更有趣的是,相关簇的平均持续时间与簇的大小也呈现幂律关系,这意味着大簇不仅更庞大,其内部联系也更持久。研究者还检测到了典型的1/f噪声(一种功率谱密度与频率成反比的信号),这种被称作“临界态指纹”的现象,进一步印证了系统处于自组织临界的边缘。
03.
稳定的“临界态”
真正考验自组织临界性的,是系统是否能在不同条件下自发回到临界态,而不需要像调节水温那样精确调参。研究团队分别在物理实验和计算机模拟中,大幅改变了机器人的亮度和群体密度——在物理实验中,光强和密度都提高了四倍;在模拟中,更是跨越了从100到10000个体的数量级。
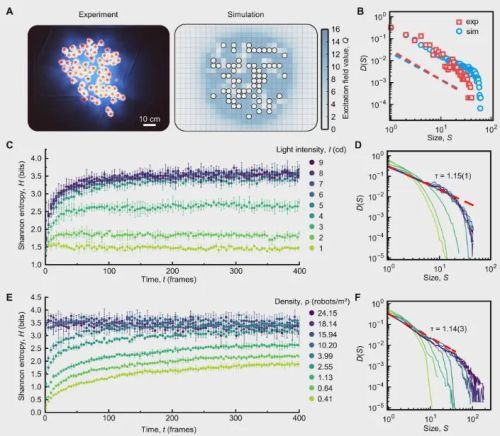
在不同系统参数下的实验和模拟中,香农熵及相关簇分布
结果显示,无论参数如何变化,只要光强和密度超过一个极其微弱的阈值,系统总能演化到同一种临界状态。研究者用香农熵来量化相关簇多样性,发现一旦超过阈值,熵值就会收敛到一个固定的数值,相关簇的幂律分布及其指数也保持稳定。这就像一锅处于沸腾临界点的水,无论你用的是电磁炉还是燃气灶,只要火力足够,它都会自发维持在100℃。
这种“有限尺度标度普适性”赋予了系统极强的鲁棒性。即便向水池中投入若干个不发光、只发射红外信号的“刺激源”,系统依然维持着幂律统计。机器人仅仅因为趋光性围绕刺激源聚集,却无意中涌现出了意想不到的能力。
04.
从无序中涌现功能:推箱子、搭桥梁
读到这里,你或许想问,这能用来做什么?研究者设计了一个巧妙实验。
他们在水体中放入一个被动刺激源,一个不发光、不移动的圆柱体,但它会均匀发射红外信号。机器人的红外接收器能感知这个信号,并根据信号强度调整自身可见光亮度。结果,机器人群体自发形成了指向刺激源的亮度梯度,整个子集群开始向刺激源移动,并持续推动它。数据显示,刺激源以平均0.63厘米/秒的速度稳定移动。一群完全没有被编程“推物体”的机器人,仅仅依靠局部规则,就涌现出了集体搬运行为。
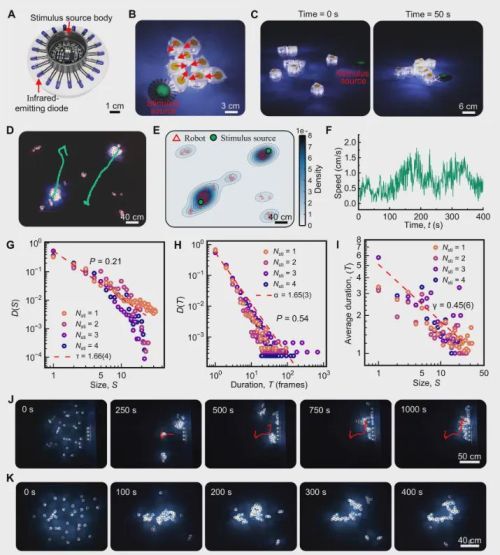
刺激源扰动下的ARS系统
更令人惊叹的是,刺激源的引入并没有破坏系统的临界性。相关簇的大小和持续时间分布,依然遵循完美的幂律。系统在“干活”的同时,依然保持着自组织临界状态。
当放置多个固定刺激源时,更多涌现行为出现了:机器人自发聚集在刺激源周围形成高密度区域;在两个相距40厘米的刺激源之间,机器人甚至“建造”了一座持续稳定的桥梁结构。
05.
从物理学原理到群体智能
这项研究的启示是多维度的。
对于复杂系统科学,它提供了一个可控的实验平台。传统自组织临界性研究多依赖于计算机模型(如著名的沙堆模型)或被动观测(如地震数据)。如今,研究者可以在物理世界中实时调整参数,观察临界态的演化、扰动响应和相变过程。
对于机器人学,它展示了一条通向群体智能的新路径。传统群体机器人通常需要明确的通信协议或复杂的协同算法。而这项研究表明,通过物理场(光场、流体力场)的隐式耦合,简单的局部规则就能涌现出全局智能行为,并且无需中央控制,无需显式编程。
这在微型机器人领域尤其有前景。当机器人小到无法搭载复杂计算单元时,“用物理交互替代算法”可能成为实现群体智能的关键。