

出品:Yuanxq 出品:具身智能研究室
01
问题定义:不是生成一整段舞蹈,而是每一刻都要出动作
很多音乐生成动作的方法,默认是离线生成。
模型可以看到完整音乐,可以使用未来上下文,也可以反复优化整段动作。这个设定适合做视频、动画和固定舞蹈片段,但不适合现场控制。
DiscoForcing 把问题改成了在线流式生成:
在当前时刻,模型只能看到已经到来的音频,以及前面生成过的一小段动作历史,然后预测接下来的短动作片段。
这个设定里有三个硬约束。
第一,因果性。模型不能使用未来音乐。它只能根据当前滑动窗口里的音频特征做判断。
第二,低延迟。每一帧都要在很短时间内算出来,否则动作会慢半拍。放到机器人乐队里,慢半拍比动作不够华丽更致命。
第三,长时程稳定。在线生成不是生成 5 秒就结束,而是要一直滚动。前面生成过的动作会进入下一步历史,一点小误差可能会慢慢放大,最后变成漂移、抖动、节奏错位。

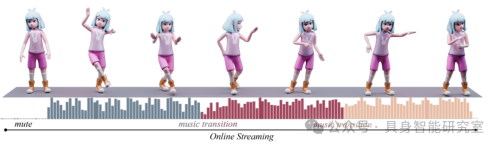
这张图展示的就是这个问题:前面静音,角色保持安静;音乐恢复,动作立刻起来;中间发生多次音乐切换,动作还要继续保持连续。
所以 DiscoForcing 不是单纯问“动作像不像舞蹈”,而是在问:
当音频条件不断变化时,生成模型能不能持续给出稳定、同步、低延迟的身体动作。
02
第一步:把实时音乐编码成节奏和相位
整个算法的入口是音频流。
系统会维护一个滑动音频窗口。每到一个时间步,它只处理当前已经听到的这段音频,而不是整首音乐。
这里用了一个因果音乐编码器,核心是 VQ-PAE。它把音乐特征拆成两部分:
第一部分是离散节奏 token。可以理解成模型对鼓点、节拍、节奏模式的离散归纳。
第二部分是连续相位特征。它描述节奏在周期里走到哪里,帮助动作和音乐相位对齐。
直白一点说,这一步要解决两个问题:
这一拍在哪里?现在节奏走到哪一段?
如果没有这一步,后面的动作生成就只能看到一堆原始音频特征,很难稳定对齐节奏。对于机器人乐队来说,这相当于先把“听见声音”变成“听懂节拍”。
03
第二步:把全身动作压到更适合实时生成的潜空间
音频处理完之后,模型还要生成身体动作。
问题是,全身动作维度很高。如果直接在原始动作空间里做扩散生成,实时性会很吃力,动作也容易抖。
DiscoForcing 先设计了一种动作表示,再用 VAE 把动作压缩到潜空间。
论文里的动作表示是 272 维,里面包括根部速度、根部角速度、局部关节位置、关节速度和关节旋转。
这里有一个很工程的选择:它没有只用常见的 HumanML3D 263 维表示,因为 263 维表示缺少关节旋转,后面要恢复可执行动作时还需要额外 IK 或拟合。
DiscoForcing 选择 272 维表示,是为了让动作可以更直接地通过正向运动学恢复出来,减少实时部署时的后处理成本。
这点很重要。
如果只是离线生成,后处理慢一点问题不大;但如果要接到实时 Avatar 或人形机器人平台,每一个额外步骤都会变成延迟。机器人乐队场景尤其不能等。
04
第三步:用 Diffusion Forcing 做流式动作生成
现在有了音乐特征,也有了动作潜空间,接下来就是核心生成模型。
DiscoForcing 用的是 Diffusion Forcing Transformer。
这里不要把 Diffusion Forcing 直译成“扩散力”。它更像是一种面向序列生成的训练方式:同一条时间序列里,不同位置可以处在不同噪声水平下,模型要学会在不完整、不可靠的历史条件下继续生成后续动作。
为什么这对实时生成重要?
因为在线系统里的历史动作并不总是可信。前面生成过的动作可能有漂移,旧音乐节奏可能已经过时,用户也可能突然换了一段输入。如果模型太相信历史,它就会反应慢;如果完全跟随新音频,动作又可能断掉。
DiscoForcing 的核心难点,就是在“相信历史”和“响应新音乐”之间做平衡。
论文里设计了几种噪声调度方式,其中比较关键的是梯形噪声调度。它会对比较远的历史加更高噪声,相当于告诉模型:远处历史可以参考,但别被它绑死。
这样做的好处是,节奏发生变化时,模型更容易从旧动作惯性里抽出来,同时又不会完全丢掉动作连续性。
05
第四步:推理时用滑动窗口,一边去噪一边输出
训练是一回事,真正在线推理又是另一回事。
DiscoForcing 在推理时维护一个 FIFO 滑动窗口。每次生成时,它会在窗口尾部加入一个新的噪声 token,然后对窗口里的 token 做逐步去噪。
当窗口最左边的 token 被去噪到足够干净时,就把它作为当前输出动作发出去。然后窗口向前滑动,再加入新的噪声 token,继续生成下一步。
这个过程很像流水线:
新音频进来,新动作 token 加进来,窗口内部去噪,最早完成的动作被输出,系统继续滚动。
为了进一步平衡稳定和响应,论文还用了 Temporal Guidance。
它会同时看两种趋势:一种更依赖历史,用来维持动作连续;另一种更依赖当前音频,用来快速响应变化。最后把两者组合起来,得到当前输出方向。
这就是它能在音乐切换时继续生成动作的关键。

这张图可以按这条链路读:
音频输入经过因果音乐编码,变成节奏和相位特征;这些特征进入 Diffusion Forcing Transformer;模型结合历史动作缓冲区,生成下一段全身动作;动作再送到在线 Avatar 或人形机器人部署流程里。
换成机器人乐队的话,就是:
听见音乐,理解节奏,生成身体动作,再把动作交给身体执行。
06
实验最值得看的,是实时性怎么被算进账本
论文在 FineDance 和 AIST++ 上做了常规对比,和 FACT、Bailando、EDGE、Lodge、MEGADance 等方法比较动作质量、节奏对齐和多样性。
这些指标可以说明 DiscoForcing 生成效果不差。但我更关心消融实验里的延迟。

表里有一个很直接的结果:100 步去噪时,某些指标会更好,但延迟到了 261.91 ms/frame;10 步去噪时,延迟大约是 26.26 ms/frame,更适合 30 FPS 实时生成。
这就是实时系统的账本。
离线生成可以为了指标多跑几轮,现场系统不行。机器人乐队里,动作慢半拍,观众马上就能看出来。
所以 DiscoForcing 的重点不是把离线指标刷到极限,而是在动作质量、节奏响应和实时延迟之间做取舍。
论文最后选择 10 步去噪,就是因为它在效果和实时性之间更均衡。这个选择比单纯追最高指标更接近部署需求。
07
它离真正机器人乐队还差什么?
DiscoForcing 还不能直接等同于机器人乐队。
它解决的是“音乐驱动身体动作”的实时生成问题,但真正机器人乐队还会多出几层更硬的约束。
第一,乐器演奏需要接触和力控制。打鼓、弹琴、拨弦都不是单纯摆姿态。机器人要在正确时间、正确位置,用合适力度触碰乐器。
第二,多机器人需要同步和分工。一个角色跟音乐动起来,和一组机器人共同演奏,是两个难度。鼓手、贝斯、键盘和主唱对节奏的依赖都不一样。
第三,全尺寸人形机器人还要考虑稳定性和安全。重心、碰撞、关节限位、安全停止、长时间运行,这些都不是当前论文的重点。
第四,音乐理解还可以更复杂。现在主要是节奏和相位层面的响应。真正乐队还涉及段落结构、主旋律、情绪变化、即兴空间和人机协作。
更准确的说法是:
DiscoForcing 补的是机器人乐队最底层的一块:实时音乐变化时,身体怎么连续、及时、稳定地回应。
08
写在最后
这篇论文最有意思的地方,是它没有停在离线生成。
它把扩散模型放到了一个更接近现场的设定里:输入是流式的,未来不可见,动作必须马上输出,历史误差还会影响下一步。
这件事看起来像音乐舞蹈生成,往深处看其实很具身。
因为具身智能最终面对的就是一个持续变化的世界。人说话会停顿,音乐会转段,环境会变化,任务会中断,机器人自己的动作也会反过来改变下一步状态。
机器人乐队只是一个很容易被看见的场景。
它把问题压缩成一句话:
身体能不能听见变化,并且立刻用动作回应。
DiscoForcing 还只是其中一块,但这块位置很清楚。
机器人乐队真正难的,不只是让机器人发出声音,而是让机器人身体进入音乐现场










