


高擎Mini Pi plus开源人形机器人平台ICRA 2026全球首发
在机器人科研与教育领域之中,一种满足“买得起、用得上、能持续开发”条件的人形平台长期未能实现。
机器人大讲堂于近日获悉,在ICRA 2026大会上,高擎动力即将推出的Mini Pi plus,旨在借助15公斤的轻量化机身、完整的开源生态以及从仿真到真机的全栈工具链,来填补这一空白。
人形科研平台的不可能三角
在过去两年间,随着人形机器人正迈向产业化的关键阶段,科研领域的真实应用体验却面临着不容忽视的挑战。对于高校实验室、研究机构以及各类机器人竞赛团队而言,在选择人形机器人开发平台的过程中,依然普遍陷入一种被称为“不可能三角”的困境,即高性能、低成本以及易于使用与高安全性这三者,很难同时被满足。
审视当前市场中的主流产品,其分布呈现出一种两极化的态势。一端是高度接近一米、整机重量达三十公斤上下的重型平台,这类平台的搬运作业通常需要两名人员协同方能完成,而一旦发生倾倒,其维修成本将极为高昂,在需要多人共享使用的实验环境中,通过安全审批也往往面临诸多挑战。另一端则是所谓的玩具级轻量化产品,这类产品存在电机输出扭矩不足的先天缺陷,其所依赖的URDF模型与实际物理样机之间存在严重偏差,进而导致在仿真环境中可以顺畅运行的算法与策略,在实体样机上却无法执行,因此其对于前沿学术研究的价值相当有限。
更深层次的挑战则存在于软件生态建设层面。多数厂商在提供基础软件开发工具包(SDK)及机器人操作系统(ROS)接口之后,往往便止步于应用程序编程接口(API)列表的交付,而未能供应从零开始构建开发环境的完整指南。与此同时,强化学习基线、从仿真环境到真实世界的部署指引以及具体任务示例等关键资源亦处于缺失状态。其最终导致的结果是,研究团队需要把大量时间与精力投入至环境搭建与问题排查之中,而非专注于算法本身的创新与优化工作。
这恰恰构成了高擎动力在ICRA 2026大会上推出Mini Pi plus的初衷。该公司致力于通过一台兼具轻量化结构与高性能表现、并且软件生态完全开源的小型人形机器人,来打破当前科研平台所面临的价格壁垒以及技术层面的黑箱问题。
02.
轻量化不是妥协,而是设计哲学
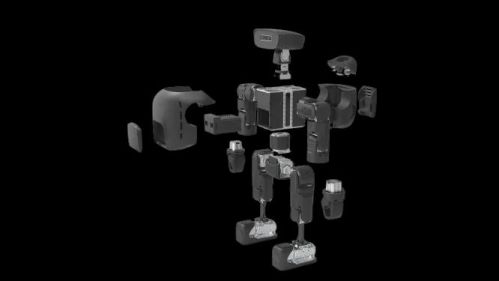
从机器人大讲堂获取的参数来看,Mini Pi plus给人的首要印象便是其“轻量化”的特质。该机器人的整体高度为75.6厘米,整机重量仅为15公斤,这一数据显著低于当前主流平台通常介于95至123厘米的高度范围,以及19.5至29公斤的重量区间。
这一尺寸的设定并非单纯为了便携,而是基于科研适配的深思熟虑。因此,这个尺寸使其可以在共享实验室环境中安全地运用,无需安装物理围栏,一名研究者即可轻松地进行搬运;即便在频繁迭代的强化学习训练中发生跌倒,低冲击动能也大大降低了硬件损坏的风险以及维修的频次,从而使得“高频试错”成为可能。
然而,轻量化的设计绝不以牺牲其性能表现作为代价。Mini Pi plus的峰值扭矩能够达到21牛·米,全身拥有23个或者27个自由度(DOF),支持诸如行走、奔跑,乃至后空翻在内的各种高动态动作。其质量与扭矩之间的比例接近于1:1,这使其在较小的体积内,得以实现了全尺寸人形机器人才具备的动力学性能。在单次充满电后,其能够提供1至2小时的续航时长,这足以覆盖一次完整实验所需的全部流程。
据机器人大讲堂了解,Mini Pi plus已经借助Project Instinct真机完成了验证工作,能够完成后空翻、复杂地形自主穿越以及跌倒自主恢复等高动态任务。那些以往仅在大型双足平台上才得以实现的动作,如今已被成功压缩进了一台仅15公斤的机身之中。

在技术层面真正的突破,还体现在其通信架构的设计上。Mini Pi plus的所有关节均运用CAN-FD总线来进行通信,其电机控制环的频率能够达到30kHz,实时驱动环的频率为1kHz。该系统配合PD控制以及前馈力矩补偿,确保了高频控制指令可以被顺畅地下发,从而避免了传统串行总线可能带来的性能瓶颈。对于从事全身控制、模型预测控制(MPC)或深度强化学习的研究人员而言,这种底层实时能力是验证其先进算法的必要前提条件。
03.
从源头压缩Sim2Real鸿沟
机器人大脑模型的研究工作已然成为当前领域的主流探索方向,然而Sim2Real GAP始终是腿足机器人研究领域所面临的一道"隐形杀手"。
大量研究团队发现,在Isaac Gym或MuJoCo等仿真环境中表现优异的控制策略,当借助实物平台进行部署时,其步态稳定性和任务执行能力往往会出现显著下降。导致这一现象的根本原因,并非源于算法模型本身的缺陷,而是仿真模型与真实机器人硬件之间存在的系统性参数偏差所引发的。这些偏差具体体现在多个物理细节层面,例如电机转子的转动惯量、关节处的摩擦系数,以及减速器内部存在的非线性传动特性等。而这些关键参数,在机器人厂商所提供的默认仿真模型文件中,通常会因简化建模而被忽略或赋予理想化数值。
Mini Pi plus的解决思路便是从源头进行对齐。高擎动力公开了经过出厂校准的完整URDF模型,其电机参数、关节限位以及惯量信息均被直接写入模型之中,从而使得仿真环境与真实机器之间的动力学特性保持高度一致。
与此同时,团队成功构建了一套包含域随机化、系统辨识以及特权信息蒸馏的完整Sim2Real流程,并且兼容了IsaacLab、MuJoCo和Gym等主流仿真器。由此可以得知,研究人员能够将精力集中于策略的设计工作,而不必将数周的时间耗费在反复调试之上。
04.

从ROS上下到全栈工具链生态开源
如果说硬件参数界定了一个平台所能够达到的基础下限,那么软件生态则决定了在此之上开展的科研工作所能企及的上限高度。
Mini Pi plus的开源策略,并非仅仅挂出一个GitHub链接那么简单,而是构建了一套分层且全覆盖的开发体系。
在底层支持方面,平台提供了适用于ROS以下层级的Python及C++ SDK,并同时兼容ROS 1与ROS 2双栈环境,由此构建了从高层脚本调用到底层实时控制的完整API接口体系。硬件通信架构基于7通道CAN-FD拓扑进行设计,并集成了统一的URDF模型、TF坐标框架、RViz可视化、相机驱动以及ONNX推理等全链路工具支持。这意味着研究人员能够便捷地接入其自定义的感知与控制模块,整个过程无需进行逆向工程。
在ROS之上的上层,系统配备了开箱即用的全栈工具链。该工具链具体涵盖诸如行走、奔跑以及后空翻在内的Locomotion基线策略;机载深度感知与自适应视角控制相结合的Perceptive Locomotion技术,且已在0.3米高台滚翻、楼梯、坡道以及间隙等复杂地形上完成真机验证;支持下半身行走策略与上半身操作策略同步运行的Loco-manipulation示例;以及提供完整的Sim2Real部署指引。
尤为值得关注的是,其构建了名为“From Scratch Doc”的文档体系。该体系并非传统意义上的API列表,而是提供了一条从首次运行、环境搭建、仿真基础直至Sim2Real部署的完整学习路径,并辅以教程、参考手册以及原理解析三个层次的结构。这种设计能够帮助新加入的研究者或工程师独立完成上手操作。此外,其在GitHub社区上持续进行文档更新,变更日志与版本发布记录亦保持公开可追踪的状态。这种达到工业级软件标准的文档规范,在人形机器人科研平台中实属较为少见。
05.
从一台机器人到一个生态
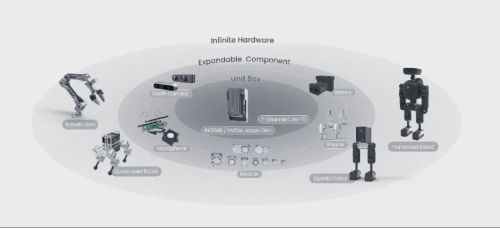
机器人大讲堂从所获取的技术文档中发现,高擎动力对Mini Pi plus的定位并非仅限于单台机器人,而是将其视作可扩展的基础设施。
由于其模块化主控盒子能够连接整个产品矩阵,覆盖从双足到四足、从机械臂到全人形的多种类型,从而使得一套代码库可以实现多平台复用。例如,上半身Manipulation策略的接口处于完全开放状态,研究者能够自由地接入诸如视觉-语言-动作(VLA)模型、人机交互(HRI)策略或神经科学接口等组件。
据悉,Mini Pi plus已经进入了包括苏黎世联邦理工学院(ETH Zurich)、加州大学伯克利分校(UC Berkeley)以及香港大学在内的全球多所顶尖实验室。该平台被广泛应用于运动控制、全身控制以及视觉-语言-动作(VLA)模型与神经科学等多个交叉研究领域。与此同时,清华大学、浙江大学、汉堡大学、华中科技大学等多所高校的RoboCup参赛队伍,亦选用Mini Pi plus pro作为其比赛平台。其中,浙江大学的ZJU-Dancer战队正是凭借该平台,在German Open 2026赛事中成功夺得了Small Size组别的冠军。此外,香港科技大学(广州)与成均馆大学等机构,也正基于Mini Pi plus在人机交互方向持续展开深入探索与推进。
在产业侧方面,已有多家从学术领域延伸至产业领域的初创公司,与影视行业的头部公司成功完成了规模化合作项目的落地实施。该小尺寸人形平台正逐步对其生态系统的承载能力进行验证。
06.
轻量化与开源化,人形科研平台的两大核心转向
在机器人科研与教育领域,长期以来存在一种困境:能够满足“买得起、用得上、能持续开发”条件的人形平台始终未能实现。
机器人大讲堂近日获悉,在ICRA 2026大会上,高擎动力即将正式推出的Mini Pi plus,旨在借助其15公斤的轻量化机身、完整的开源生态以及从仿真到真机的全栈工具链,来填补这一市场空白。
在过去两年间,随着人形机器人产业化步入关键阶段,科研领域的实际应用体验却面临着不容忽视的挑战。对于高校实验室、研究机构以及各类机器人竞赛团队而言,在选择人形机器人开发平台时,依然普遍陷入一种被称作“不可能三角”的困境——高性能、低成本以及易于使用与高安全性这三者,往往难以同时得到满足。
审视当前市场中的主流产品,其分布呈现出一种两极化的态势。一端是高度接近一米、整机重量达三十公斤上下的重型平台。这类平台的搬运作业通常需要两名人员协同方能完成,而一旦发生倾倒,其维修成本将极为高昂,在需要多人共享使用的实验环境中,通过安全审批也常常面临诸多挑战。另一端则是所谓的玩具级轻量化产品,这类产品存在电机输出扭矩不足的先天缺陷,其所依赖的URDF模型与实际物理样机之间存在严重偏差,进而导致在仿真环境中可以顺畅运行的算法与策略,在实体样机上却无法执行,因此其对于前沿学术研究的价值相当有限。

更深层次的挑战则存在于软件生态建设层面。多数厂商在提供基础软件开发工具包(SDK)及机器人操作系统(ROS)接口之后,往往便止步于应用程序编程接口(API)列表的交付,而未能供应从零开始构建开发环境的完整指南。与此同时,强化学习基线、从仿真环境到真实世界的部署指引以及具体任务示例等关键资源亦处于缺失状态。其最终导致的结果是,研究团队需要把大量时间与精力投入至环境搭建与问题排查之中,而非专注于算法本身的创新与优化工作。
这恰恰构成了高擎动力在ICRA 2026大会上推出Mini Pi plus的初衷。该公司致力于通过一台兼具轻量化结构与高性能表现、并且软件生态完全开源的小型人形机器人,来打破当前科研平台所面临的价格壁垒以及技术层面的黑箱问题。
从机器人大讲堂获取的参数来看,Mini Pi plus给人的首要印象便是其“轻量化”的特质。该机器人的整体高度为75.6厘米,整机重量仅为15公斤,这一数据显著低于当前主流平台通常介于95至123厘米的高度范围,以及19.5至29公斤的重量区间。

这一尺寸的设定并非单纯为了便携,而是基于科研适配的深思熟虑。因此,这个尺寸使其可以在共享实验室环境中安全地运用,无需安装物理围栏,一名研究者即可轻松地进行搬运;即便在频繁迭代的强化学习训练中发生跌倒,低冲击动能也大大降低了硬件损坏的风险以及维修的频次,从而使得“高频试错”成为可能。

然而,轻量化的设计绝不以牺牲其性能表现作为代价。Mini Pi plus的峰值扭矩能够达到21牛·米,全身拥有23个或者27个自由度(DOF),支持诸如行走、奔跑,乃至后空翻在内的各种高动态动作。其质量与扭矩之间的比例接近于1:1,这使其在较小的体积内,得以实现了全尺寸人形机器人才具备的动力学性能。在单次充满电后,其能够提供1至2小时的续航时长,这足以覆盖一次完整实验所需的全部流程。
据机器人大讲堂了解,Mini Pi plus已经借助Project Instinct真机完成了验证工作,能够完成后空翻、复杂地形自主穿越以及跌倒自主恢复等高动态任务。那些以往仅在大型双足平台上才得以实现的动作,如今已被成功压缩进了一台仅15公斤的机身之中。
在技术层面真正的突破,还体现在其通信架构的设计上。Mini Pi plus的所有关节均运用CAN-FD总线来进行通信,其电机控制环的频率能够达到30kHz,实时驱动环的频率为1kHz。该系统配合PD控制以及前馈力矩补偿,确保了高频控制指令可以被顺畅地下发,从而避免了传统串行总线可能带来的性能瓶颈。对于从事全身控制、模型预测控制(MPC)或深度强化学习的研究人员而言,这种底层实时能力是验证其先进算法的必要前提条件。
机器人大脑模型的研究工作已然成为当前领域的主流探索方向,然而Sim2Real GAP始终是腿足机器人研究领域所面临的一道"隐形杀手"。
大量研究团队发现,在Isaac Gym或MuJoCo等仿真环境中表现优异的控制策略,当借助实物平台进行部署时,其步态稳定性和任务执行能力往往会出现显著下降。导致这一现象的根本原因,并非源于算法模型本身的缺陷,而是仿真模型与真实机器人硬件之间存在的系统性参数偏差所引发的。这些偏差具体体现在多个物理细节层面,例如电机转子的转动惯量、关节处的摩擦系数,以及减速器内部存在的非线性传动特性等。而这些关键参数,在机器人厂商所提供的默认仿真模型文件中,通常会因简化建模而被忽略或赋予理想化数值。
Mini Pi plus的解决思路便是从源头进行对齐。高擎动力公开了经过出厂校准的完整URDF模型,其电机参数、关节限位以及惯量信息均被直接写入模型之中,从而使得仿真环境与真实机器之间的动力学特性保持高度一致。
与此同时,团队成功构建了一套包含域随机化、系统辨识以及特权信息蒸馏的完整Sim2Real流程,并且兼容了IsaacLab、MuJoCo和Gym等主流仿真器。由此可以得知,研究人员能够将精力集中于策略的设计工作,而不必将数周的时间耗费在反复调试之上。
如果说硬件参数界定了一个平台所能够达到的基础下限,那么软件生态则决定了在此之上开展的科研工作所能企及的上限高度。

Mini Pi plus的开源策略,并非仅仅挂出一个GitHub链接那么简单,而是构建了一套分层且全覆盖的开发体系。
在底层支持方面,平台提供了适用于ROS以下层级的Python及C++ SDK,并同时兼容ROS 1与ROS 2双栈环境,由此构建了从高层脚本调用到底层实时控制的完整API接口体系。硬件通信架构基于7通道CAN-FD拓扑进行设计,并集成了统一的URDF模型、TF坐标框架、RViz可视化、相机驱动以及ONNX推理等全链路工具支持。这意味着研究人员能够便捷地接入其自定义的感知与控制模块,整个过程无需进行逆向工程。
在ROS之上的上层,系统配备了开箱即用的全栈工具链。该工具链具体涵盖诸如行走、奔跑以及后空翻在内的Locomotion基线策略;机载深度感知与自适应视角控制相结合的Perceptive Locomotion技术,且已在0.3米高台滚翻、楼梯、坡道以及间隙等复杂地形上完成真机验证;支持下半身行走策略与上半身操作策略同步运行的Loco-manipulation示例;以及提供完整的Sim2Real部署指引。
尤为值得关注的是,其构建了名为“From Scratch Doc”的文档体系。该体系并非传统意义上的API列表,而是提供了一条从首次运行、环境搭建、仿真基础直至Sim2Real部署的完整学习路径,并辅以教程、参考手册以及原理解析三个层次的结构。这种设计能够帮助新加入的研究者或工程师独立完成上手操作。此外,其在GitHub社区上持续进行文档更新,变更日志与版本发布记录亦保持公开可追踪的状态。这种达到工业级软件标准的文档规范,在人形机器人科研平台中实属较为少见。
机器人大讲堂从所获取的技术文档中发现,高擎动力对Mini Pi plus的定位并非仅限于单台机器人,而是将其视作可扩展的基础设施。
由于其模块化主控盒子能够连接整个产品矩阵,覆盖从双足到四足、从机械臂到全人形的多种类型,从而使得一套代码库可以实现多平台复用。例如,上半身Manipulation策略的接口处于完全开放状态,研究者能够自由地接入诸如视觉-语言-动作(VLA)模型、人机交互(HRI)策略或神经科学接口等组件。
据悉,Mini Pi plus已经进入了包括苏黎世联邦理工学院(ETH Zurich)、加州大学伯克利分校(UC Berkeley)以及香港大学在内的全球多所顶尖实验室。该平台被广泛应用于运动控制、全身控制以及视觉-语言-动作(VLA)模型与神经科学等多个交叉研究领域。与此同时,清华大学、浙江大学、汉堡大学、华中科技大学等多所高校的RoboCup参赛队伍,亦选用Mini Pi plus pro作为其比赛平台。其中,浙江大学的ZJU-Dancer战队正是凭借该平台,在German Open 2026赛事中成功夺得了Small Size组别的冠军。此外,香港科技大学(广州)与成均馆大学等机构,也正基于Mini Pi plus在人机交互方向持续展开深入探索与推进。
在产业侧方面,已有多家从学术领域延伸至产业领域的初创公司,与影视行业的头部公司成功完成了规模化合作项目的落地实施。该小尺寸人形平台正逐步对其生态系统的承载能力进行验证。
机器人大讲堂观察指出,Mini Pi plus的发布,深刻映射出人形机器人科研工具领域当前正在经历的两个关键转型方向。
第一个转向体现为轻量化设计的优先。过去,行业层面长期追逐“更大、更强、更像人”的形态,然而在科研领域,真实需求更多地转向了“安全可靠、高频操作以及低成本快速迭代”。因此,15至20公斤的重量区间,因其既能承载完整的全身动力学特性,又能显著降低应用门槛,正逐步确立为新的黄金尺度。可以预见,在这一趋势下,预计会有更多厂商选择跟进半人形及小人形这类特定的机器人形态。
第二个转向则体现在生态系统的决定性作用方面。随着产业链日益完善,硬件参数逐渐趋于同质化,真正的差异化竞争已转向软件工具链的完整性以及可复现性。一份明确的Sim2Real迁移指南、一套可实际运行的强化学习基线代码、一个活跃的开发者社区——这些软性基础设施,正逐步成为研究者选择开发平台时所考量的关键决策依据。高擎动力公司将完整的URDF模型、SDK、仿真接口以及示例控制策略全部公开,这一举措实际上是在为整个具身智能研究社区奠定基础。
当然,挑战依然存在。目前,轻量化机身受到材料特性的限制,在上半身操作任务中的负载能力、在复杂动态动作下的散热与耐久性、以及社区生态的长期维护等方面,都需要进行持续的验证。但至少,Mini Pi plus提供了一个难得的起点,作为一个开放平台,研究者真正敢于放手去进行尝试、去经历摔打、去实施改进。
ICRA现场邀请|展位034
随着ICRA 2026即将召开,高擎动力公司将在034展位面向全球范围内的科研学者、开发者以及合作伙伴,开放真机的动态演示环节。届时,参观者能够近距离观察包括后空翻在内的各类真机动态行为,并有机会与核心研发团队进行面对面交流,深入探讨底层控制技术、仿真环境部署以及潜在的科研合作方向。
此外,现场订购可享受ICRA限时促销!
团队期望以此为具身智能研究奠定坚实基础。这台重量为15公斤的轻量化人形机器人平台,是否能够引发科研生态的深层次变革,值得全球开源社区持续地关注与共同参与。
我们在展位034,期待与你相遇。
From Scratch链接:https://www.hightorque.cn/pi-plus-from-scratch/
来源:高擎Mini Pi plus开源人形机器人平台 ICRA 2026全球首发,有哪些看点? | 机器人大讲堂










