一个自带耳朵和眼睛的水下机器人,在加勒比海的珊瑚礁上,靠“听”和“看”自己找到了生物集群最集中的地方。
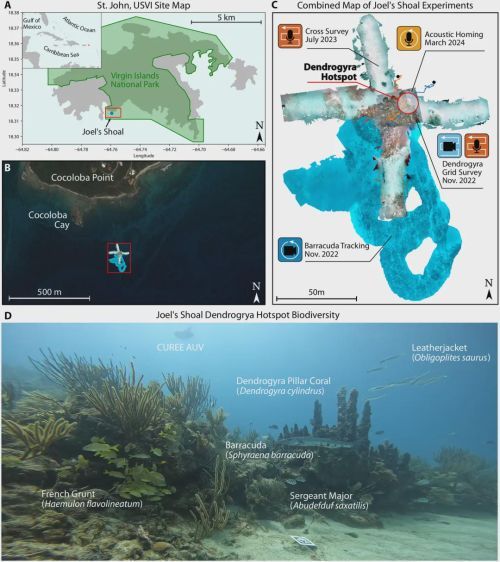
在加勒比海美属维尔京群岛的海底,有一片名为 Joel‘s Shoal 的健康珊瑚礁。这里是大量鱼类和无脊椎动物的家园,也是科学家长期监测的生态样地。2022年11月到2024年3月,一个名叫CUREE的小型水下机器人(全称Curious Underwater Robot for Ecosystem Exploration)在这里完成了三轮实验。

它的任务不只是拍照片和画地图,而是靠自己在浑浊、复杂、充满遮挡的海底,找到鱼和其他海洋生物最聚集的地方。
这项成果于近日登上《Science Robotics》最新一期封面,研究团队来自伍兹霍尔海洋研究所(WHOI)、麻省理工学院(MIT)和圣约翰礁石国家公园等单位。
01.
为什么要找“生物最聚集的地方”?
珊瑚礁占全球海洋面积不到0.01%,却养育了大约25%的海洋物种。但这些物种不是平均分布的,它们会扎堆。有的地方密密麻麻全是生物,有的地方空空荡荡。而且这些“热闹区域”的尺度小得惊人,可能只有几米,甚至不到一米。
这意味着如果我们只关心整片珊瑚礁的平均状况,就会把那些真正重要的地方“平均掉”了。而恰恰是这些小小的生物扎堆区,决定着整片珊瑚礁的生态韧性,哪些区域在退化面前更“抗造”、哪些地方应该优先保护,答案都藏在这里。
科学家的难题是:怎么找到这些巴掌大的扎堆区?
现在的办法很笨:派潜水员下去数。成本高、风险大、能看的范围小。水下机器人倒是能跑更远,但大多数机器人只关心珊瑚和石头,那些不会跑的东西。
会动的那些,鱼会躲、枪虾藏在石缝里、海胆很难用摄像头发现,一台只有一个传感器的机器人根本搞不定。
02.
两条腿走路:视觉 +听觉
研究团队发明的这款新型水下机器人叫CUREE。它的配置很有意思:四只耳朵(水听器)+ 两只眼睛(两台摄像头)。
水听器排成平面阵列,最大孔径 0.88 米,采样率 48 kHz,能听到两段频带:50 Hz–2 kHz(鱼叫声) 和 4–20 kHz(枪虾咔嚓声)。摄像头分别朝前和朝下,视野110度。
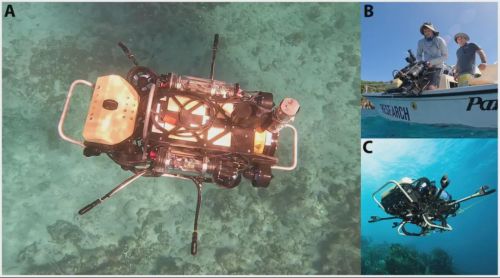
(A)CUREE是一种小型便携式AUV,专为浅水生态系统的自主探索而设计(60)。(B) CUREE可由单人从小船轻松部署。(C)其多模态感测包括安装在伸出臂上的四个水听器,以及前下摄像头,用于寻找珊瑚礁上的生物活动热点。
这套多模态方案不是简单堆料。简单说就是:视觉能看到“那里确实有鱼”,很准但看不远;声学能听到“那个方向有动静”,范围大但模糊。两者怎么配合?
团队设计了一个数学模型来算,把“机器人看到了什么、听到了什么”和“海底到底有多少生物”之间的关系拆解成三层。
机器人先收集数据(第一层),然后根据每种传感器的“直接性”去推断各物种的分布(第二层),最后再把这些物种分布拼成一个整体的生态热点判断(第三层)。
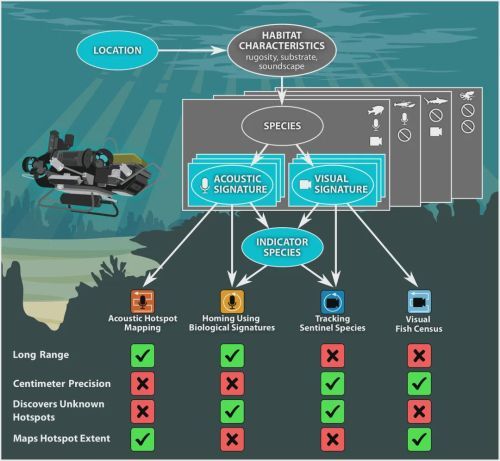
用于珊瑚礁生物活动的视觉和声学观察生成模型
在这个框架下,团队开发了四种自主行为,两种开环(画地图),两种闭环(主动找)。
- 方法一:眼睛扫一遍,看得清清楚楚
第一个实验最简单粗暴。让CUREE在一片15米×20米的区域来回跑,像割草一样全覆盖。33分钟跑了210米,下视摄像头拍了1万多张照片,用AI模型数里面有几条鱼。
结果很有意思。只有36%的照片里有鱼。但在一棵叫Dendrogyra的柱珊瑚2米范围内,每张照片里的鱼数量比其他地方平均高出24.7倍。最多的一张照片里,密密麻麻挤了65条鱼。
作为对照,同期潜水员手动拍摄的视频中,同一区域的平均鱼数也比其他地方高出9.42倍,CUREE的自动化检测比人眼更灵敏。
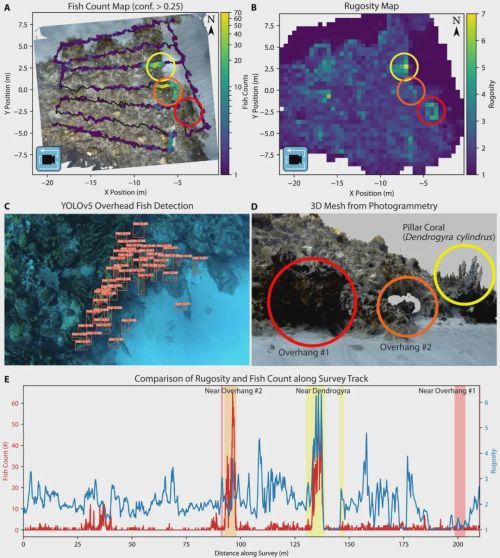
为什么生物喜欢这儿?用3D重建一看,这片区域的礁石表面坑坑洼洼、凹凸不平,复杂度是沙地的6倍多。结构越复杂,生物越爱待。
- 方法二:耳朵听一遍,听得远远的
眼睛看得准,但有个硬伤,水下能见度只有几米。那更远的地方怎么办?
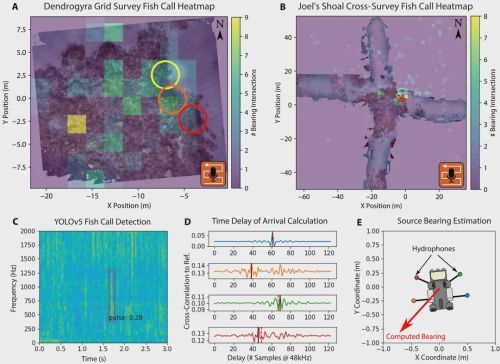
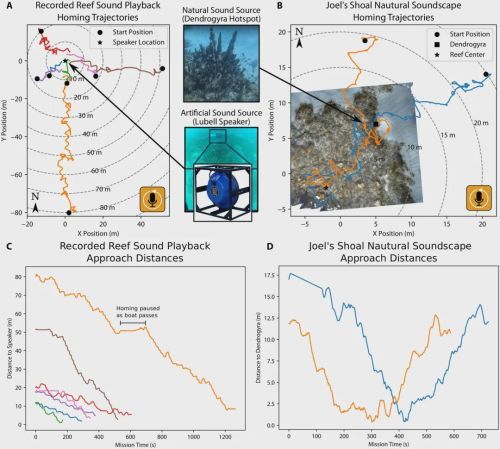
第二个实验换耳朵上阵。CUREE关掉推进器,漂在水里听15秒(避免自己的噪音干扰),记录鱼叫声,然后用时间差反推声音是从哪个方向来的。这次覆盖范围扩大到50米长的十字形航线。
结果指向了同一个地方:那棵柱珊瑚附近。
但有意思的是,声学找到的热点“浓度”只有视觉的十几分之一,视觉显示那边鱼多24倍,声学只显示多1.8倍。眼睛看得准但范围小,耳朵听得远但模糊,这俩正好互补。
- 方法三:让枪虾当“导盲人”
前两种方法有个前提,你得大概知道热闹的地方在哪,才能去扫描。如果完全不知道呢?
第三个实验让CUREE自己导航。这次不听鱼叫了,鱼叫太稀疏,等不起,而是听枪虾。枪虾在健康的珊瑚礁上多得要命,它们发出的咔嚓声几乎不停。CUREE用波束形成器实时判断声音方向,每3秒往那个方向挪一步。
先用一个水下扬声器当假目标测试。CUREE从10米到80米外都能成功导航过去,平均误差不到4米。中间有次一艘摩托艇从上面开过去,机器人自动暂停了十几秒,之后继续锁定—,说明这招在真实环境里扛得住干扰。
然后真刀真枪上礁,从离礁20多米外的沙地出发,CUREE两次都成功摸到了那棵柱珊瑚,最近距离不到半米。第一次只花了1分32秒就从起点抵达了礁石,而之前系统性地扫描画图要花30分钟以上。
- 方法四:跟一条梭鱼,让它带路
第四个实验换了个思路,不找声音,找一条“向导鱼”。
研究人员挑了条梭鱼,这片区域的顶级捕食者,成天到处溜达。用视觉跟踪算法锁定它,让CUREE跟着走,保持鱼在画面中央。
跟了10分钟,跑了将近300米。中间需要人工干预7次(鱼跑出镜头或者算法跟错了对象)。累计干预时间56秒,其余8分59秒是完全自主的。
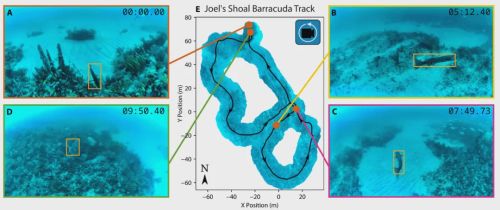
梭鱼的路线很有意思:从柱珊瑚出发,向西穿过珊瑚礁,再向南绕过一片岩石区,最后绕回起点。途中它两次回到柱珊瑚那边,还在一个沙地上方和一条大笛鲷起了冲突,全程被CUREE拍了下来。
03.
四种方法,指向同一个地方
眼睛看的、耳朵听的、枪虾带路的、梭鱼领路的——四种完全不同的方法,都指向了同一个结论:Joel’s Shoal珊瑚礁东北侧那棵Dendrogyra柱珊瑚周围,就是这片海域里生物最密集的地方。这个结果在15个月里的多轮实验中一直成立。
更重要的是,两种传感器可以互相校准。
视觉数据虽然范围小,但可以用来“标定”声学数据,比如在热点区域,一帧里有65条鱼,而声学定位的热度只有1.8 倍差异。有了这个换算关系,以后就能用声学数据去推断视觉看不全的大范围区域里大概有多少生物。这为未来用声学推断物种丰度铺了路。
04.
未来与结语
这套系统厉害的地方不止在“能找到热点”。它展示了如何在不知道目标在哪、信息又不完整的情况下,自己做决策——先用听得远但模糊的耳朵快速扫一圈,锁定目标区域,再用看得准但距离短的眼睛做精细确认。
对于正在快速退化的全球珊瑚礁来说,一个能快速定位、精确定量、可重复部署的工具,是生物学家长久以来缺的那把尺子。
而这把尺子最特别的地方在于,它自己会去找该量哪里。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.adx9939