



如果说过去一轮具身智能热潮,更多由大模型能力、机器人视频演示和资本预期共同推动,那么进入2026年,行业正在被拉回一个更具体的问题:机器人能否在真实环境中稳定工作,并形成可复制、可验证、可交付的产业能力。
近期,机器人行业的几个信号不断叠加。资本市场侧,宇树科技IPO进程受到关注,机器人板块情绪明显回暖;产业侧,特斯拉Optimus量产预期持续升温,比亚迪、小鹏、优必选等企业也在密集释放机器人布局信号;技术侧,英伟达同步推出面向机器人开发的Cosmos 3模型及GR00T参考平台,旨在构建开放生态、降低研发门槛。
智元机器人围绕AGIBOT WORLD数据集和世界挑战赛持续推进,真实物理交互数据、世界模型、神经仿真器、动作预测等概念被推到更核心的位置。行业讨论正在从“机器人看起来能做什么”,转向“模型如何理解物理世界、数据如何支撑持续进化、系统如何走向规模化落地”。
也就是说,具身智能正在进入一个更硬核的阶段:
世界模型要回答“机器人如何理解世界”;数据基座要回答“机器人如何持续学习”;本体与传感系统要回答“机器人如何执行任务”;产业链协同要回答“机器人如何从样机走向交付”。
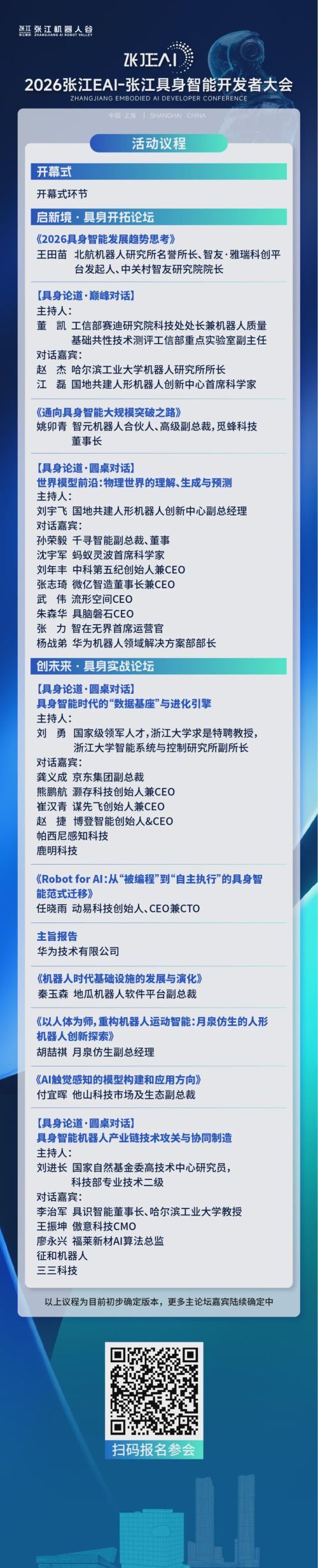
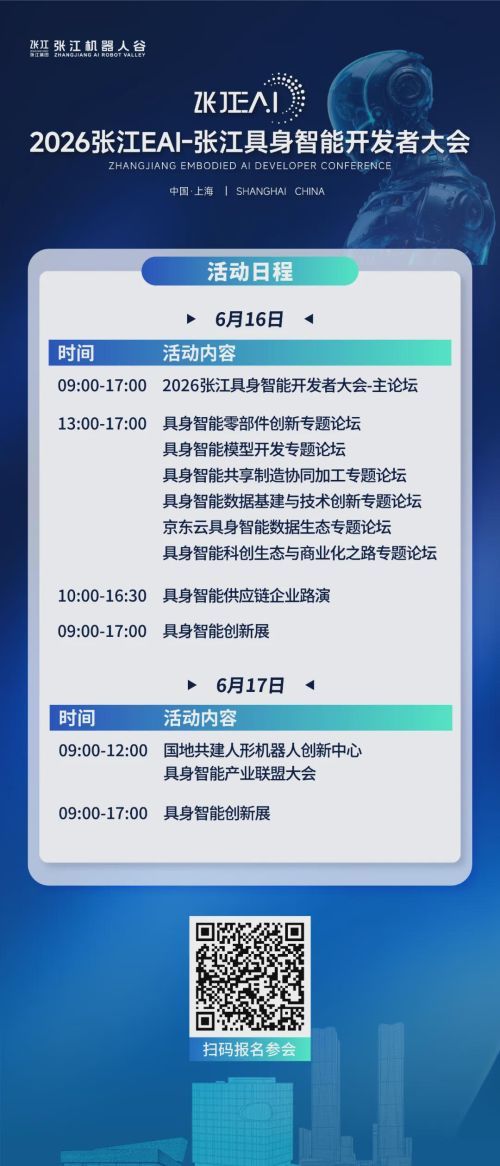
6月16日,2026张江EAI-张江具身智能开发者大会主论坛将在浦东张江科学会堂举行。本次主论坛的议程更加聚焦问题链条:从世界模型、数据基座,到具身大模型、触觉感知、运动智能,再到产业链技术攻关与协同制造,逐层拆解具身智能从技术探索走向产业落地的关键路径。
01.
趋势判断:谁来判断2026年的具身智能走向?
大会将回答:具身智能进入产业化窗口期后,行业应该如何判断方向,如何识别真正的技术变量,如何避免只停留在概念热度中。
王田苗 ,北航机器人研究所名誉所长、智友·雅瑞科创平台发起人、中关村智友研究院院长,将带来《2026具身智能发展趋势思考》。这一议题将会从行业周期、技术路线和产业节奏出发,讨论具身智能从实验室演示走向工程应用时,哪些能力是短期可验证的,哪些问题仍需要长期攻关。
对观众来说,这一环节的价值是建立观察具身智能产业的坐标系:世界模型是不是核心变量?人形机器人量产到底卡在哪里?资本热度、技术突破与产业落地之间应该如何对应?
02.
战略突围:产业化需要系统工程能力
具身智能的产业化,很难依靠单一算法或单一硬件完成。真正的问题在于,模型、本体、传感、控制、制造和场景之间能否形成闭环。
在【具身论道·巅峰对话】环节,工信部赛迪研究院科技处处长、机器人质量基础共性技术测评工信部重点实验室副主任董凯将主持“具身智能的产业化路径与战略突围”。对话嘉宾包括哈尔滨工业大学机器人研究所所长赵杰、国地共建人形机器人创新中心首席科学家江磊。这一圆桌将围绕产业化路径展开:技术从样机到产品需要跨过哪些门槛?整机企业和核心部件企业如何协同?高校科研成果如何进入工程系统?
姚仰青 ,智元机器人合伙人、高级副总裁、觅蜂科技董事长,将分享《通向具身智能大规模突破之路》。这一议题将会结合企业一线实践,讨论具身智能从模型训练、数据采集、本体控制到产品部署的全栈路径。对于希望理解“机器人何时真正规模化”的观众,这一环节值得重点关注。
03.
聚焦世界模型:从生成世界到理解世界、预测世界
世界模型是本次主论坛中最具前沿性的议题之一。过去,很多“世界模型”更多停留在视觉生成和场景渲染层面;但对于机器人来说,仅仅生成一个看起来合理的画面远远不够。机器人需要理解物体关系、接触约束、材料差异和动作后果,需要在不完整观测中预测世界如何变化。
在“世界模型前沿:物理世界的理解、生成与预测”圆桌中,国地共建人形机器人创新中心副总经理刘宇飞将担任主持人,对话嘉宾包括千寻智能副总裁、董事孙荣毅;蚂蚁灵波首席科学家沈宇军 ;中科第五纪创始人兼CEO 刘年丰 、微亿智造董事长兼CEO张志琦;流形空间CEO 武伟 ;具脑磐石CEO 朱森华 ;智在无界首席运营官张力;华为机器人领域解决方案部部长杨战弟等。对具身智能而言,世界模型的价值在于让机器人在行动前能够预判环境变化、评估动作后果,并在真实任务中形成可迭代的决策闭环。在具身智能语境下,世界模型不只是生成式AI的延伸,而是连接感知、仿真、预测和行动规划的中间层。
这一圆桌预计将集中讨论几个问题:世界模型的核心到底是生成可见画面,还是建立可用于推理、仿真和行动规划的状态表征;模拟器、规划器和生成模型之间如何融合;世界模型如何为机器人任务规划、动作预测和仿真验证提供更可靠的底层能力。对于关注物理AI的人来说,这一环节是在回答世界模型如何真正进入机器人系统。
04.
深入数据基座:物理交互数据如何成为进化引擎?
如果说世界模型提供“理解和预测世界”的框架,那么数据基座决定模型能否持续进化。通用大模型依赖互联网文本、图像和视频数据,而具身智能更需要机器人在真实世界中产生的多模态交互数据,包括视觉、触觉、力控、位姿、动作轨迹、失败样本和长尾场景。尤其是抓取失败、接触异常、路径中断、力控偏差等非理想样本,往往比标准演示更能帮助模型理解真实世界中的边界条件。
“具身智能时代的数据基座与进化引擎”圆桌将由国家级领军人才、浙江大学求是特聘教授、浙江大学智能系统与控制研究所副所长刘勇主持。京东集团副总裁龚义成 、灏存科技创始人兼CEO 熊鹏航 、谋先飞创始人兼CEO 崔汉青 、博登智能创始人&CEO赵捷、帕西尼感知科技、鹿明科技等企业代表将参与讨论。
这一环节预计会讨论具身智能数据从哪里来、如何标注、如何评估、如何与仿真数据形成虚实互补。更进一步,它还会回应一个产业问题:当机器人进入工厂、仓储、家庭、商业服务等不同场景,数据能否沉淀为可复用的模型能力,并在不同任务和不同本体之间形成迁移,是具身智能能否持续进化的关键。
05.
回到身体:把模型能力转化为真实执行
“创未来·具身实战论坛”,将从前沿判断转向工程问题。它关注的是机器人能不能在真实任务中执行、泛化、纠错和稳定交付。
任晓雨 ,动易科技创始人、CEO兼CTO,将带来《Robot for AI:从“被编程”到“自主执行”的具身智能范式迁移》。这一议题将会讨论传统机器人依赖规则编程的局限,以及具身智能如何通过感知、学习和任务规划,把机器人从固定动作执行推进到自主任务完成。
具身智能不是单纯的模型智能,而是模型、身体、感知、控制与制造体系共同构成的系统智能。机器人要进入物理世界,必须拥有能够承载模型能力的身体系统:运动控制要稳定,触觉反馈要可靠,核心部件要可量产,制造体系要可交付。
胡喆祺 ,月泉仿生副总经理,将分享《以人体为师,重构机器人运动智能:月泉仿生的人形机器人创新探索》。这一议题预计会从仿生学和人形机器人运动控制切入,讨论如何借鉴人体运动机制,提升机器人在复杂地形、动态环境和多任务场景中的运动能力。
付宜晖 ,他山科技市场及生态副总裁,将带来《AI触觉感知的模型构建和应用方向》。视觉让机器人“看见”世界,触觉则让机器人“接触”世界。该议题预计会围绕触觉传感、力觉反馈、材质识别、抓取稳定性等方向展开,讨论触觉感知如何成为具身智能走向精细操作的关键补充。
【具身论道·圆桌对话】将聚焦“具身智能机器人产业链技术攻关与协同制造”。国家自然基金委高技术中心研究员、科技部专业技术二级刘进长将担任主持人,具识智能董事长、哈尔滨工业大学教授李治军;傲意科技CMO 王振坤 ;福莱新材AI算法总监廖永兴,以及征和机器人、三三科技等企业代表将参与讨论。
这一圆桌对话将会把问题落到产业链深处:核心部件如何降低成本并提升一致性,软件平台如何适配不同本体,制造企业如何支撑快速打样和小批量试产,供应链如何从单点配套转向协同创新。
06.
论坛与展览联动:把趋势判断放回产业现场
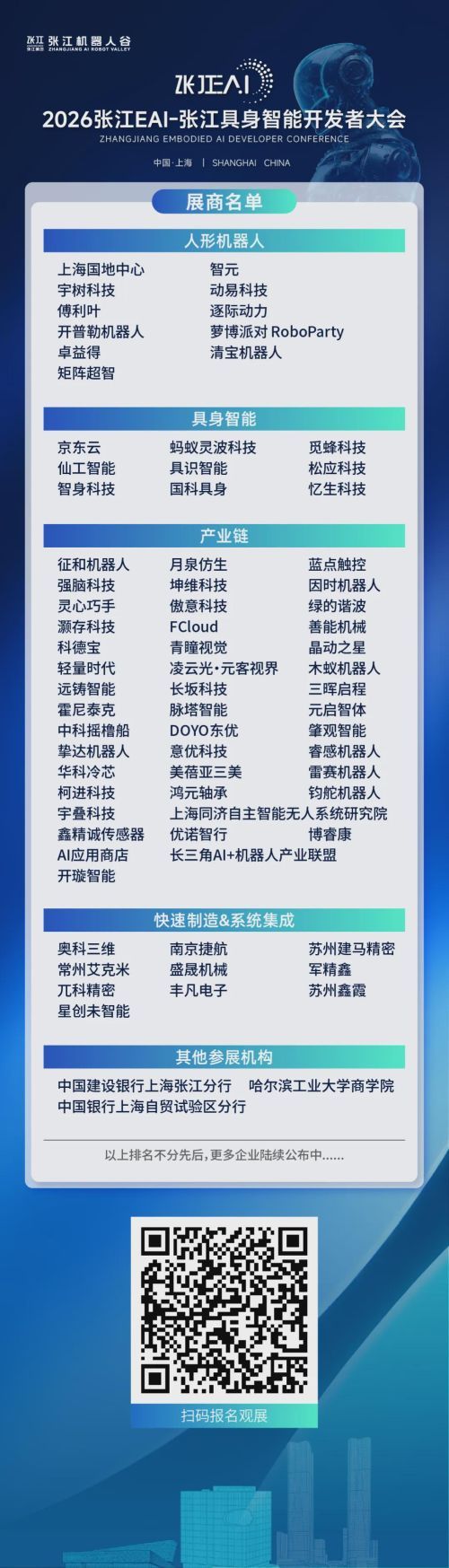
主论坛帮助观众理解问题,创新展则让观众看到这些问题如何被产品、部件和系统能力回应。大会同期设置具身智能创新展,汇聚80余家人形机器人、具身智能、核心部件、快速制造与系统集成等方向的头部明星企业。
对于观众来说,最有效的参观方式不是单纯“逛展”,而是带着论坛中的问题去看现场:世界模型需要怎样的数据和本体支撑?触觉感知如何落到抓取和操作?协同制造如何支撑机器人从样机走向交付?哪些企业正在补齐产业化过程中的关键环节?
这也是本次大会的价值所在:把前沿思想、技术路线、产品能力和产业资源放在同一个现场,让行业人士可以更集中地观察具身智能从概念到落地的真实进度。
07.
观众报名开启:6月16日,相约张江科学会堂
2026张江EAI-张江具身智能开发者大会主论坛将于6月16日在浦东张江科学会堂举办。
如果你关注世界模型、数据基座、物理AI和人形机器人产业化,或希望理解核心部件、快速制造与系统集成如何支撑机器人落地,这场主论坛值得来到现场。
6月16日,欢迎来到张江,听趋势、辨路径、看落地,一起观察具身智能产业化的下一步。
观众报名通道现已开启,扫码锁定席位。
商务合作咨询:堂博士(同微信)13810423387
观众报名咨询:堂博士(同微信)15611695072
点击文末“阅读原文”即可报名参会。














