

01
90% 虚拟训练,不等于机器人不用下地干活
如果把机器人训练比作上学,过去的方式更像“直接进车间当学徒”:机器人在真实设备上抓取、碰撞、失败、重置,再一点点学会动作。问题是,这种学习很贵,也很慢。一次失败可能损坏夹爪、碰坏工装,甚至带来安全风险。
英伟达 GR00T (英伟达 Isaac GR00T 是人形机器人全栈开放平台,搭载开源 VLA 基础模型,配套仿真与算力工具,降低通用机器人研发门槛)所代表的“虚拟优先”路线,想做的事情很直接:先把机器人送进一个可无限重开的“元宇宙学校”。在这个学校里,机器人可以看海量视频、练无数次抓取、尝试不同光照和布局,还能在不损坏设备的情况下经历失败。
因此,“90% 虚拟训练”更准确的理解不是“90% 的机器人能力已经被仿真完全解决”,而是:大量可重复、可参数化、可扩增的训练环节,正在从真实世界迁移到计算世界。机器人先在虚拟环境中形成通用能力,再用少量真实数据做校准、纠偏和安全验证。
真正的问题不在于“仿真能不能用”,而在于:它能替代到哪一步?最后那 10% 为什么仍然绕不开真机?

02
虚拟训练能教什么?最后 10% 又卡在哪里?
虚拟训练最适合教机器人三类能力。
第一类是“看懂世界”。例如识别物体、理解空间关系、判断桌面上哪个杯子需要被拿起。通过渲染、合成数据、世界模型生成视频,机器人可以看到大量不同场景:不同光照、不同桌面、不同物体位置、不同遮挡关系。
第二类是“学会常见动作”。例如抓取、搬运、放置、双臂协作、简单装配、开关抽屉、物体交接。这些动作可以在仿真中大量重复,形成动作先验。
第三类是“提前经历失败”。真实机器人不能无限试错,但虚拟机器人可以。它可以摔倒、抓空、撞到桌边、误判距离,然后把这些失败变成训练样本。
但最后 10% 仍然必须回到真机。原因很简单:现实世界不是高清动画,而是复杂物理系统。摩擦系数会变,物体会变形,接触会打滑,电机会发热,传感器会有噪声,网络会有延迟,夹爪表面的磨损也会改变抓取效果。
尤其在高精度装配、插孔、柔性物体操作、强接触任务中,差一点就是失败。仿真可以告诉机器人“应该怎么做”,真机闭环则回答“这样做在这台机器、这个工位、这个材料上到底行不行”。
03
三、GR00T 的核心,不是一台机器人,而是一套训练工厂
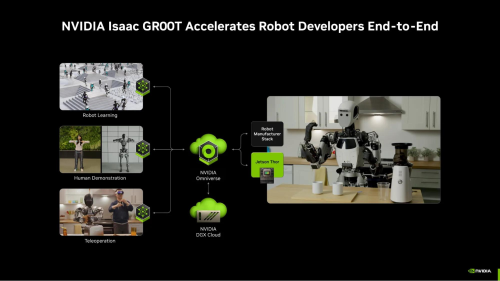
GR00T 容易被误解为“英伟达做了一个机器人模型”。实际上,它更像一套机器人训练基础设施。
第一层是机器人基础模型。GR00T N 系列属于视觉—语言—动作模型,也就是 VLA 模型。输入是图像、语言指令和机器人自身状态,输出是连续动作。简单说,人告诉机器人“把杯子放进箱子”,模型要理解场景、分解任务,并生成手臂和手指的动作。
第二层是仿真与合成数据。Isaac Sim、Isaac Lab、Omniverse 负责构建虚拟环境,生成机器人能练习的任务。过去收集机器人数据需要人类遥操作,现在则可以用少量真实演示生成更多合成轨迹。这样,数据规模不再完全受制于人类操作员的时间。
第三层是世界模型与物理引擎。Cosmos 这类世界模型负责生成和预测物理世界中的视频状态,Newton 这类物理引擎则试图提升接触、动力学和机器人学习的精度。一个偏“想象世界”,一个偏“约束物理”。二者结合,才可能让虚拟训练不只是好看的动画,而是更接近真实的训练环境。
可以把这套体系理解为一个数据金字塔:

这也是 GR00T 路线最关键的逻辑:不是用虚拟数据消灭真实数据,而是用虚拟数据放大真实数据。
04
Sim-to-Real 的三道鸿沟,GR00T 想怎么跨?
第一道鸿沟是动力学不精确。仿真里的质量、摩擦、碰撞、关节阻尼很难和真实世界完全一致。解决办法通常包括系统辨识、域随机化、更强物理引擎,以及在真机上做少量后训练。换句话说,不指望仿真完全等于现实,而是让模型适应一组可能的现实。
第二道鸿沟是感知差异。真实相机有噪声、曝光、反光、畸变和遮挡;仿真图像再逼真,也可能缺少真实世界的“脏”。Cosmos、合成数据、照片级渲染可以缓解这个问题,但不能彻底消除。透明杯子、金属反光、柔性布料,依然是感知系统的难点。
第三道鸿沟是分布偏移。训练时机器人看到的是整洁桌面,部署时可能是杂乱仓库;训练时物体是标准件,现场可能有磨损、灰尘、变形和人为干扰。世界模型可以生成更多变化,但它生成的是“模型知道的变化”。真正未知的长尾,还得靠真机闭环暴露。
所以,虚拟训练的价值不是保证机器人一次上岗成功,而是把真机试错从“大海捞针”变成“有针对性的补课”。

05
真机闭环不是落后路线,而是最后验收
近两年机器人行业有一个明显趋势:大家越来越重视真实数据、真实工位和真实闭环。原因并不复杂。机器人最终要在物理世界中交付,而不是在仿真视频里交付。
在移动机器人、腿足机器人等场景中,仿真已经显示出很强价值。因为这些任务的动力学相对可建模,评价指标也比较清楚:能不能走、能不能避障、能不能保持平衡。
但在灵巧操作和复杂接触中,仿真的天花板更明显。例如插针、拧螺丝、装配卡扣、整理布料、拿易碎物体,都涉及细微力控和接触状态切换。接触一旦发生,系统就从连续运动进入非连续状态:粘住、滑开、卡住、弹回,都可能发生。这里的难点不是“看起来像”,而是“力真的对”。
这也是为什么“仿真预训练 + 真机微调”比“纯仿真替代真机”更现实。前者是工程路线,后者更像技术乌托邦。
06
如果虚拟训练真能覆盖 90%,产业会发生什么?
第一,机器人开发门槛会下降。过去中小团队很难承担大量真机采集、测试场地和安全损耗。如果合成数据和仿真评测足够可靠,小团队可以先在虚拟环境完成模型预训练和任务验证,再把有限预算用于关键真机测试。
第二,数据资产会重新定价。过去最值钱的是“谁有更多真实机器人数据”。未来还要看谁有更好的数字孪生场景、更准确的物理参数、更系统的评测任务,以及更强的合成数据清洗能力。
第三,新的技术门槛会出现。仿真不是免费午餐。高质量 USD 资产、真实工位建模、传感器标定、物理参数识别、仿真并行训练、数据治理、模型评测,都需要专业能力。没有真机成本,不等于没有工程成本。
第四,机器人公司会更像“AI 工厂”。硬件仍然重要,但算法训练、数据闭环和部署迭代会成为核心竞争力。谁能更快地把失败转化为数据,谁就能更快进化。

07
结语
GR00T 的价值,不在于证明“机器人可以不接触现实”。恰恰相反,它承认真实世界太贵、太慢、太危险,所以要先把大部分练习搬到虚拟世界。90% 虚拟训练如果成为现实,它不是对真机训练场的颠覆,而是对真机训练场的重新分工:虚拟世界负责规模化学习,真实世界负责校准、纠错和验收。
所谓机器人训练的“元宇宙学校”,不是捷径,也不是幻觉。它更像一所成本更低、容量更大的预科学校。机器人可以在那里练会大部分基本功,但真正能不能毕业,仍要看它在现实工位上能不能稳定、可靠、安全地完成任务。










