



你上一次看到人形机器人搬重东西,是什么时候?
绝大多数人对人形机器人的印象,也许还停留在拧螺丝、叠衣服、跳舞这类“轻松”的活儿。而就在最近,波士顿动力在X平台上发布了一段颠覆很多人固有印象的视频——这段39秒的视频里,新版Atlas人形机器人以一个深蹲下潜,双臂环抱起一台装满杂物的迷你冰箱,躯干180度利落转身,大步流星走向工程师。

要知道那台冰箱总重超过45公斤,而Atlas整机不过90公斤。整套动作行云流水,没有任何机械的迟滞感。

01.
市面上大多数机器人,其实“没干过重活”
为什么人形机器人很少展示搬重物?原因是绝大多数机器人其实不具备干重活的能力。
目前主流的操作范式高度依赖视觉反馈:用摄像头盯着目标物,手指尖精细抓取,完成相对简单的接触任务。这套逻辑在轻量级分拣、包装场景中尚且能用,但遇到真正需要发力的场合,就失灵了。绝大多数机器人缺少一套关键能力,那就是全身体感与力反馈的深度融合。

翻译成人话就是:机器人不知道自己使了多大劲儿,也不清楚物体的重心在哪儿。
人类搬一个特别沉的箱子时,不会傻乎乎地只用手指硬拉。我们会用前臂贴合箱体,肱二头肌、腰腹、双腿同时参与发力。遇到重量超出预期,还会下意识地调整姿态,把部分负荷从手臂转移到躯干和髋部。这种“全身协同发力”的能力,在自然界中叫本体感知,在工程语言里叫物理智能。
而真正的体力劳动,恰恰就需要这种能力。
Atlas的团队负责人Alberto Rodriguez这样介绍新技术:“你不能仅凭看着冰箱和用手抬起它。你必须先预判重量,然后倾斜身体,顺应它的形状,测试你是否能举起它。”
02.
训练场不在实验室,在虚拟世界里“摔了几百万次”
Atlas的这套搬冰箱动作,同样是走的强化学习路线。
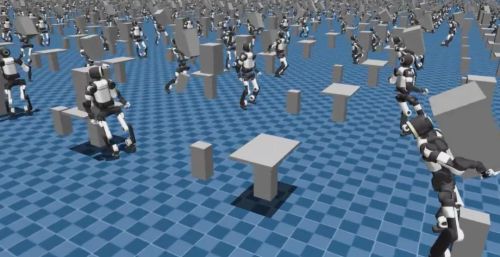
训练逻辑大致分三步。第一步,工程师用动画轨迹给Atlas一个参考模板,告诉它大概怎么靠近冰箱、怎么下蹲、怎么把身体贴过去。第二步,设计一套奖励函数,确保机器人不仅要抱起冰箱,还要抱得稳、走得平,中途被推拉也能重新稳住。第三步,也是最关键的一步,扔进仿真环境里疯狂训练。
在GPU并行仿真中,Atlas面对的是成千上万种冰箱:有的歪着放,有的冰箱里的杂物会来回滑,地面摩擦系数随机变化,抓握位置故意别扭。据披露,Atlas在虚拟环境中进行了数百万小时的训练。训练负载原本设定在23到32公斤,实战搬起的却是超过45公斤的冰箱。超出训练量这么多,它接住了,稳稳地接住了。
这其中的关键,不只是一个数字。
传统机器人遇到超重物体时,通常会触发力限保护直接停机。但Atlas在面对这台超重冰箱时,没有被“吓住”。它通过体感系统感知到物体的异常重量和重心偏移,实时调整了姿态——躯干更加前倾,双臂收紧环抱,用整个身体结构来分散压力。这就是强化学习训练出的肌肉记忆:在虚拟环境里摔过的无数次跤,最终转化为现实中的抗压能力。
03.
硬件思路大转向:从F1赛车到家用车
不过,光靠软件层面的算法迭代还不够,要想让机器人真在工厂里干活,硬件设计思路得彻底翻篇。
2024年之前,Atlas一直走的是液压路线。液压版Atlas运动能力爆表,后空翻、跑酷样样精通,但噪音大、液压油泄漏风险高、能耗高的缺点让它几乎不可能商业化量产。波士顿动力的产品负责人干脆把它比喻成F1赛车,精密、震撼,但没法当家用车开。
2024年4月,波士顿动力正式退役液压版Atlas,全面转向全电驱动方案。
新一代电驱Atlas的设计哲学,可以用一句话概括:像家用车一样可靠、易维护、能大规模生产。硬件上引入了极度简洁的模块化设计,整机只用了两种规格的执行器,左臂与右臂完全互通,左右腿也一样。模块化的设计可以使损坏部件五分钟完成现场更换,无需返厂维修。散热方案更是简单粗暴到令人印象深刻:整机只有一个风扇装在头部给芯片降温,。
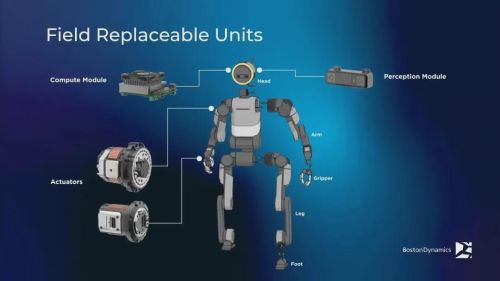
这些设计决策背后是一个清晰的目标:降低部署门槛,缩短维修时间,最终走向规模化生产。
商业化节奏也已经铺开。现代汽车集团计划在自家汽车工厂内部署超过2.5万台Atlas机器人,目标到2028年实现年产3万台。2026年的首批产能已被现代汽车和Google DeepMind瓜分。尽管目前月产能只有区区4台,但方向已经摆在那儿了——波士顿动力不打算只做实验室里的孤品,它要进厂打工。
04.
“物理智能”是什么?就是机器人替你弯腰
人形机器人走到今天,行业最大的瓶颈早已不是“它能不能像人一样走路”,而是“它能不能像人一样理解物理世界”。
物理智能到底是什么?再回头看那段视频:当Atlas抱起冰箱之前,有一个下意识的下蹲和贴近——不是设计好的程序步,而是它在感知到重心和重量后,主动选择了最省力的搬运姿态。搬运途中,如果冰箱里的杂物来回滑动,它能通过身体表面的触觉反馈瞬间调整抓握力度和手臂夹角,全程不依赖操作员干预。
这恰恰是当下绝大多数人形机器人欠缺的东西。
对比一下竞争对手的反应速度。特斯拉的Optimus曾在2024年展示了单次搬运11公斤电池托盘的能力,但到了2025年,量产计划因为手部和前臂的设计瓶颈陷入停滞——关节电机在搬运重物时容易过热,实际搬运效率不到人工的一半。Figure公司2025年发布的Figure 03则搭载20公斤的有效负载能力,最高运行速度1.2米/秒,续航约5小时,整体定位偏向家庭服务和轻量级物流。
它们在轻量级任务上的表现可圈可点,但始终缺少一套能处理“极端载荷加动态扰动”的全身运控方案。
Atlas选择的“全身体感+强化学习”路线,虽然研发周期长、技术门槛高,但一旦跑通,能力的泛化性将远超单纯依靠视觉和程序化的方案。这背后还有一个更深层的逻辑:波士顿动力不指望Atlas长得像人,而是要让它做到人类做不了的动作。Atlas的腰部可以360度旋转,头部能朝任何方向扭动,这些“超人类”的设计不是为了猎奇,而是为了适应工厂中那些人类身体根本够不到的狭窄工位和刁钻操作角度。











