随着具身智能持续升温,机器人产业的关注重点正逐步转向复杂场景下的任务理解、持续作业和规模化交付能力。
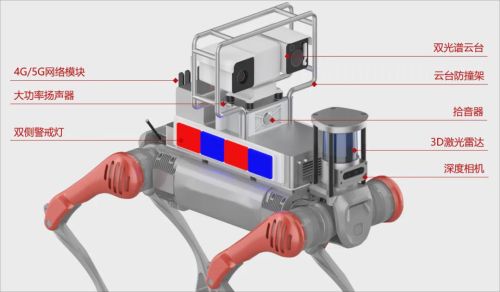
机器狗具备复杂地形适应能力和移动作业属性,是观察机器人落地应用的重要形态之一。过去,行业评价机器狗,更多看它能否稳定行走、跨越障碍、适应复杂地形;进入真实应用阶段后,行业更关注它能否在电力、交通、石化、矿山、应急、安防等场景中完成感知、判断和协同作业。
5月16日,“强化大脑赋能 合力推进机器人应用”闭门研讨会在杭州举行。本次会议由浙江大学机器人研究院(杭州海创人形机器人创新中心)、浙江省机器人产业发展协会主办,汇聚高校院所、能源电力等应用单位、机器人企业、产业服务机构和金融投资机构代表,围绕机器人落地应用中的技术瓶颈、场景需求、产品能力和生态协同展开深入交流,重点探讨机器狗场景化应用与产业落地。

会议认为,机器人落地的核心命题,正在转向“智能大脑、任务系统、行业方案、生态协同”的综合能力竞争。对于机器狗而言,稳定、可靠、可复制的作业能力,将成为打开产业市场的关键。
01.
聚焦机器人大脑,推动机器狗场景化应用
本次闭门研讨会的主题分享,既关注机器人“大脑”的底层能力,也关注场景验证、感知系统、作业能力和生态协同,体现出机器人行业从技术研发走向真实应用的务实方向。

浙江大学机器人研究院院长朱世强作《强化大脑赋能 推动机器人可靠落地应用》报告时指出,当前机器人产业热度高、技术进步快,运动控制能力和核心零部件自主化能力持续提升,但行业仍面临“样机多、可用产品少”“示范多、规模化应用难”等现实问题,核心卡点在于机器人大脑能力不足。
围绕这一产业痛点,朱世强首次对外公开“无际大脑”及其核心技术架构。该架构在当前流行的VLA基础上加入“逻辑”(Logic)层,形成VL²A(Vision-Language-Logic-Action)结构,强调拟人化逻辑分析能力,构建“感知+理解→指令+物理逻辑→行为映射”的闭环认知推理系统。由此,机器人能够结合物理规律、任务约束和动作后果进行推理判断,进一步提升复杂场景下的自主决策能力。
朱世强进一步提出,机器人大脑应具备交互、认知、决策、知识、作业五大核心能力,并遵循保护人类安全、守住伦理道德与法律底线、保护机器人自身安全三项基本原则。作为通用机器人大脑,“无际大脑”可面向不同机器人形态进行适配,并已形成面向四足机器狗的“无际狗脑”和面向人形机器人的“无际人脑”两大体系。
报告中,“机器人大学”也成为重要内容。这一载体是面向机器人产品提供综合性训练和赋能服务:通过训练场、体验馆和多类真实场景,让不同形态机器人完成“入校体检、分科培养、毕业诊断、持证上岗”的成长流程,帮助机器人企业降低开发成本、缩短产品开发周期,推动机器人从本体、样机走向可交付产品和可运营商品。他认为,未来机器人行业将从“秀本体、秀动作”走向“秀能力”,大脑能力将重塑机器人产业格局,推动行业进入以自主作业为特征的2.0时代。

中国华电集团有限公司总工程师王凤蛟围绕能源电力行业应用需求进行分享。他提出,能源电力行业拥有大量巡检、运维和高风险作业场景,机器人未来需要从监视巡检逐步走向操作、检修和平台协同,对知识储备、决策能力和作业可靠性提出更高要求。

山东大学特聘教授、长江学者宋锐作《腿足式机器人智能作业技术布局与发展思考》报告。他结合国家科技计划布局和四足机器人发展脉络,提出腿足式机器人要面向行业应用持续推进技术攻关、平台适配和场景验证。他强调,四足机器人发展需要统一接口和中间架构,建设多元化平台,以场景驱动技术成熟,并通过产学研协同放大产业链优势。

中国科学院自动化研究所研究员王硕作《视触觉传感器设计及应用》报告。他从感知层面提出,复杂环境中的机器人不能只依赖视觉,触觉能够补足力、纹理、形变、接触状态和水下流场等关键信息。视触觉传感器可用于机器狗足端接触感知、操作臂精细抓取、触觉手套数据采集,也可拓展到机器鱼和水下环境感知等方向。触觉数据只有与机器人大脑结合,才能从“感知输入”转化为“任务理解、状态判断和动作优化”,支撑机器人在复杂环境中更灵活、更稳定地完成作业。

浙江大有集团公司杭州科技发展分公司技术总监黄迪围绕《电力具身智能开发应用情况分享》作报告。分享结合电网巡检、配电站房、接触式检测等实践,提出电力场景对机器狗的感知精度、定位能力、长期可靠性、标准化作业和本体形态都有较高要求。真实业务场景正在倒逼机器狗从“能巡检”进一步走向“能作业、能协同、能长期运行”。

浙江大学机器人研究院智能移动平台所所长、杭州旗晟无际科技有限公司创始人靳兴来作《具身智能狗脑及应用落地案例汇报》。他围绕“无际狗脑”介绍了“无际大脑”赋能机器狗的落地路径,通过将场景大脑搭载到四足机器狗上,提升机器狗在工业场景中的自主巡逻、仪表识别、漏液检测、高温监测、人员跌倒识别等能力。据介绍,“无际狗脑”已在生产车间、园区、轨道交通、电力等多个工业场景开展部署验证,并在达能、雀巢等世界500强企业落地应用,为机器狗提升自主作业能力提供了场景验证。
02.
以生态协同破解机器狗落地难题
专家报告和场景分享共同指向一个问题:机器狗落地不是某一项技术、某一家企业或某一个场景能够单独完成的任务。
从技术端看,机器狗需要大脑、感知、本体、控制和任务系统协同提升;从场景端看,电力、交通、石化、矿山、应急、安防等行业对安全性、可靠性和流程嵌入提出了更高要求;从产业端看,整机、零部件、算法平台、检测认证、场景方和投资机构之间仍需形成更稳定的协作机制。
只有把分散的技术力量、场景资源、产业链能力和资本支持组织起来,机器狗场景大脑的研发和应用才能从“各自探索”走向“协同攻关”,从示范项目走向规模化落地。
这也正是会议发起“机器狗场景大脑技术开发与应用联盟”的重要背景——以联盟机制整合技术、场景、产业和资本力量,推动机器狗场景大脑从联合攻关走向应用落地。
03.
共建“机器狗场景大脑技术开发与应用联盟”
会议期间,与会各方围绕机器狗落地应用中的共性难题展开讨论,并发起“机器狗场景大脑技术开发与应用联盟”成立倡议。
该联盟旨在连接高校院所、机器人企业、核心零部件企业、行业应用单位、检测认证机构、产业服务平台、投资及金融机构等力量,围绕机器狗场景大脑开展核心技术联合攻坚、场景应用与产品熟化、标准与检验认证体系建设、人才培养等。
联盟的发起,意味着机器狗场景大脑建设将逐步走向协同推进。通过建立更稳定的合作机制,产业链各方有望在真实需求、技术能力、场景资源和应用落地之间形成更紧密连接,为机器狗从示范应用走向规模化落地提供支撑。
总体来看,本次会议以机器人落地应用为主线,围绕“大脑赋能”系统讨论了场景大脑、视触觉感知、行业应用、狗脑案例和联盟机制等内容。机器狗作为重要应用载体,也展现出从技术验证走向规模交付的清晰路径。
机器狗的下一阶段,关键在于“想得清楚、干得可靠、用得深入”。当“大脑”能力持续强化,当产业联盟机制逐步建立,当真实场景需求被充分理解和响应,机器狗将有望从示范应用走向规模交付,成为千行百业中的新型智能作业伙伴。
面向未来,机器人产业将在真实场景中持续验证能力、在产业协同中加快成熟。此次闭门研讨会,也为机器狗场景大脑技术攻关、应用落地和生态共建提供了新的协同起点。