对机器人而言,“触觉”一直是个昂贵而脆弱的奢侈品。为了让机械手感知压力、识别滑动,工程师们不得不像铺马赛克瓷砖一样,在机器人皮肤上密集排布传感单元。但连线像蛛网、焊点易断裂、信号总串扰,这些痛点长期困扰着软体机器人和人形机器人的落地。
近日,一项发表于国际权威期刊《Science Advances》的研究提供了一种极简的全新解法。中国科学技术大学工程科学学院、人形机器人研究院张世武、董帅、王二龙研究团队,联合国内外多个研究团队,提出了一套名为CLiMETS(连续液态金属柔性触觉传感)的平台,核心理念堪称颠覆:扔掉传感阵列,让一整块连续液态金属自己学会感知。

01.
液态金属的天赋:一块材料替代一个阵列
要让机器人拥有大面积触觉皮肤,传统方案的路径是“离散化”:一个单元负责一个点,成千上万个单元拼成一张感知网。这导致制造成本高、柔性差,软硬材料界面在反复弯折中极易失效。
研究团队换了一个思路:为什么不反过来,用一整块连续介质去感知复杂的触觉输入?
答案藏在镓基液态金属的流体天赋里。这种金属在室温下流动如水,却有极高的金属导电性,且毒性极低。当它浸入电解液中,液态金属表面会自发形成一层仅几纳米厚的“双电层(EDL)”,像一个微型超级电容器,储存着稳定电荷。此时,只要异物触碰液态金属表面,就会扰动双电层,引发电信号的改变。
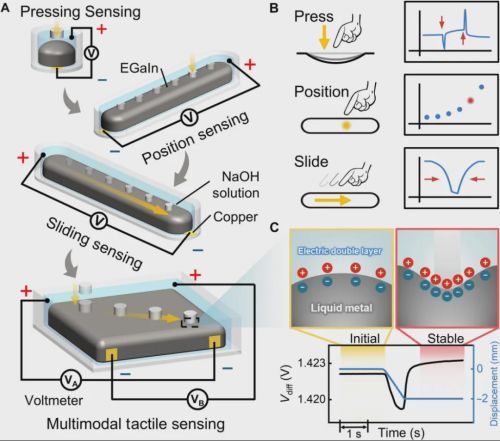
这正是 “连续体触觉传感” 的物理基础。
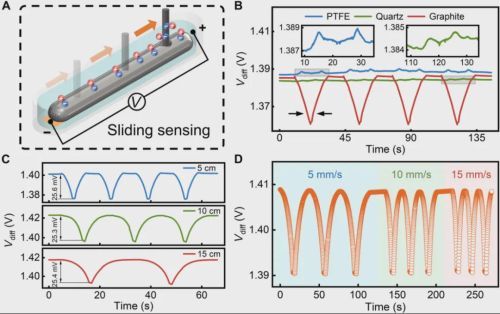
但光有电位波动还不够。如果触碰物是绝缘体,比如石英,电压变化仅有3毫伏左右,对机器人的感知系统来说几乎听不见。
02.
信号放大一百倍:当石墨棒遇上液态金属
真正的转折点,来自一项看似简单的材料选择。
研究人员发现,若将触碰物换为一根导电石墨棒,同样的按压动作,液态金属电压的响应竟然被放大超过两个数量级——从石英棒的区区1毫伏直接跃升至212毫伏,信号强度提升逾百倍。这一现象成为整个CLiMETS平台高灵敏度的基石。
这背后的原理,可以理解成一个微型的“原电池反应”。液态金属和石墨这两种材料,对电子的吸引力天生不同,石墨更强,液态金属更弱。两者一接触,电子就像被磁铁吸住一样,大量从液态金属涌向石墨,液态金属表面随即发生氧化还原反应。
说白了,石墨不仅触碰了皮肤,还顺手“偷”走了电子。这一剧烈的电荷转移过程,将一个微弱的物理扰动直接翻译成了响亮、可读的电信号。
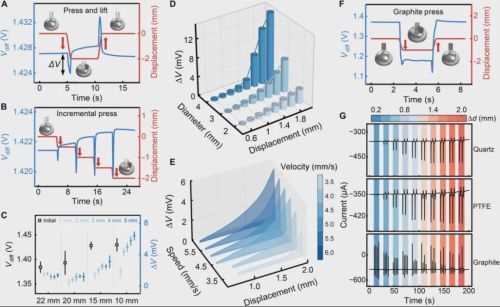
团队进一步通过电流回路测量验证了这一机制。用绝缘棒按压时,电子只是流向溶液;而石墨棒按压时,电流路径被根本性地重构,石墨成了高效的电子受体。这种“接触即放大”的特性,让CLiMETS不需要任何外接放大器,就能输出足以被机器人控制器直接识别的信号。
03.
不靠阵列也能定位:几何编码的“坐标魔术”
信号够强了,下一个难题接踵而至:没有像素阵列,怎么知道机器人被触摸的位置?
团队的答案是:让液态金属本身成为坐标系。
在一个5 cm×5 cm的方形金属液面上,他们于四个边角非对称地布置了两对电极,构成A、B两个独立测量通道。液态金属表面本身存在固有电位梯度,当石墨棒触碰任意一点时,该点距离四个电极远近不同,会在A、B两通道上砸出不同深度的“电压坑”,这两个数值组合起来,就成了这个位置的独特身份标识。
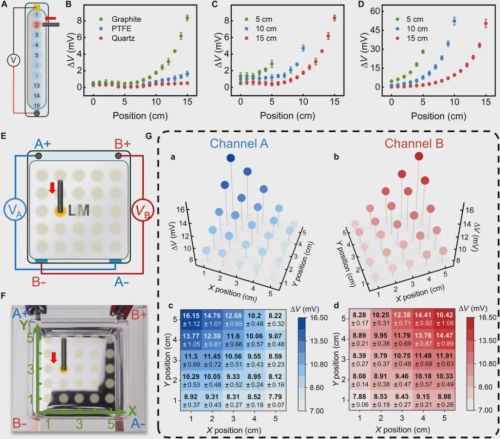
这就像给液态金属表面画了一张隐形的等高线地图。在5×5网格按压实验中,每个点位都生成了一对独特的读数,绘制出的电压等高线图清晰区分了25个位置。
对于机器人来说,只需读取两个电压值,就能像查字典一样定位被触碰的精确区域,根本不需要任何阵列布线。
04.
滑动也能“读”方向:机器手感知的最后一公里
机器人触觉的另一核心需求是识别滑动。抓取物体时,感知物体是否滑落、朝哪个方向滑,直接关系到操作成败。
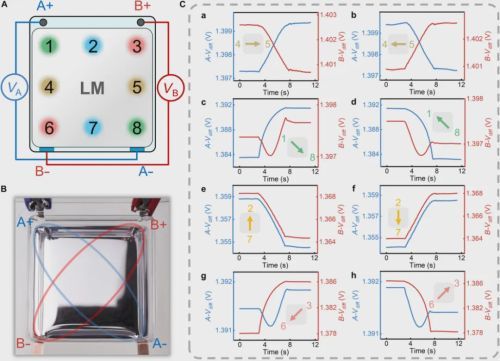
CLiMETS在此展现出惊人的方向敏感性。当石墨棒在液态金属表面滑行,动态的电压波形会随运动方向产生特征性变化。在水平滑动中,由于石墨棒靠近一侧电极的同时远离另一侧,两个通道的电压曲线呈镜像对称;垂直滑动时,两通道则同升同降;斜向滑动更是呈现出复杂的非单调波形。
团队对8个方向的滑动进行了系统性测试,电压轨迹图清晰可辨,且正向与反向运动产生镜像对称的波形。这意味着机器人控制器可以通过分析波形形态,实时确认滑动方向。
更值得关注的是耐久性。在超过6000次连续滑动循环后,电压响应剖面依然保持稳定,证明这套系统具备在机器人高频作业中可靠运行的潜力。
05.
从实验室到机器人:一块皮肤的未来想象
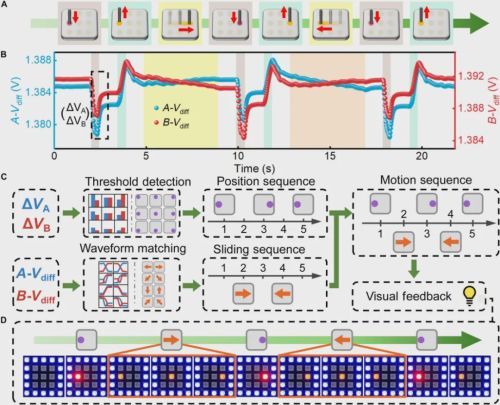
在系统级验证中,团队将CLiMETS平台与LED反馈阵列集成,构建了一套概念验证性的人机交互系统。
操作者用石墨棒在中左区域按压并保持2秒后抬起,接着移至中右区域重复压-持-抬序列,再返回初始点执行最后一次按压。双通道电压数据完整捕获了每一步,再通过后处理算法提取电压跌落、匹配预设阈值、分析波形轨迹,最终将解码出的动作序列映射到3×3 LED阵列上。
简单来说,LED亮度指示按压及其位置,光学流动显示滑动路径。液态金属上的触觉动作,被翻译成了可视的光信号。
不过,这项技术距离直接装到机器人身上仍有一些工程壁垒。
当前约8毫米的空间分辨率主要受限于数据采集系统精度及环境噪声,而非液态金属界面本身;多点同时触摸的解耦也是连续体方案需要突破的难点,论文已明确表示将引入机器学习算法解决这一问题。此外,开放式电解液环境需要封装优化,才能适应非结构化环境中的机器人应用。
但方向已然清晰。正如论文讨论部分所指出的,CLiMETS为“自适应与交互式触觉技术”奠定了坚实基础。当机器人不再需要背负密密麻麻的传感阵列,而只需“一身流动的皮肤”就能感知世界,这个极简主义方案,或许就是机器人触觉皮肤进化的下一个节点。
论文链接:https://www.science.org/doi/10.1126/sciadv.aec3673