


具身智能落地真实场景早已是行业内的常见议题,但很少有人愿意直面这一难以回答的挑战。
机械臂上下料、AGV搬运、视觉检测等场景,早已被反复打磨成标杆案例。这类规则、重复、可预期的岗位,几乎占了整个工厂场景的八成。
可当视线从这些“示范线”移开,投向更真实的制造腹地时,就会发现,那些自动化最难逾越的关隘,虽然仅占整个制造业岗位的两成左右,却消耗了远超对应比例的人力成本、培训成本和良率波动。
夹爪和传统末端执行器能够覆盖的,正是那80%重复性高、复杂性低的操作岗位。而剩下的20%恰恰是灵巧操作的专属领地,需要人手般的灵巧与感知,是自动化始终啃不下来,也绕不过去的硬骨头。

3C消费电子产线,就是这20%的典型战场之一,也是衡量一只灵巧手是否具备应用能力的严苛标尺之一。
至于为什么3C精密装配中大量工位至今无法被自动化渗透?问题根源不在于抓持不住工件,而在于缺乏感知能力、无法动态调整、也不敢把控力度。人手之所以至今难以被替代,靠的从来不是蛮力,而是对力道的精准掌控。这才是自动化产线上始终无法跨越的最后一道“手感鸿沟”。
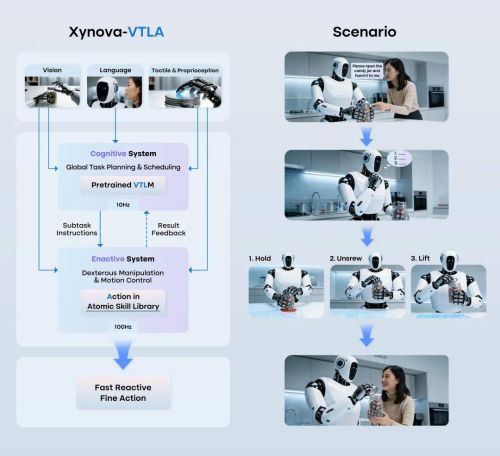
近日,曦诺未来推出了新一代仿生灵巧手Xynova Flex 2,该产品突破性地采用了腱绳+电机直驱的混合驱动方式。基于官方已公布的技术参数与能力框架,人形大讲堂以3C精密装配的真实工况为例,对这款灵巧手进行了一次场景化的深度解读,看看它能否为“手感鸿沟”交出破局答案。

▍产线上的“手感考试”,Flex2如何交出标准答卷
如果Flex 2必须在一个节拍紧凑、物料脆弱、精度苛刻的工位上证明自己,它会交出怎样的答卷?在消费电子精密装配产线的测试中,它的六项核心能力将被逐一验证拆解。

(1)灵:捏起一根排线;巧:对准一个接口
产线节拍以秒计,一个完整的取料、移动、定位、插装动作,必须在极短时间窗口内完成。这是整场测试的开卷题,也是最考验灵巧手基本功的一道。
Flex 2的指令下达延迟≤10ms,手掌仅重400g,这两个参数放在一起意味着,在工位间快速移动和急停时,它的惯性极小,末端运行不会抖动,到位即可稳定运行。
更关键的是高频动作能力。Flex 2的手掌在握拳与完全张开两个姿态间的切换用时仅250ms,相当于每秒可以完成两次完整的握拳伸展。这意味着在抓取不同类型物料时,它的手势可以跟随节拍紧凑切换,不需要额外的停留时间。
灵,是它的肌肉反应。

但真正考验灵巧手成色的,从来不是快,而是准,并且是在接触之后依然准。
排线细如发丝,连接器接口间隙以毫米计。Flex 2拥有23个自由度,其中19个主动自由度、4个被动自由度,与人手的主动控制和被动顺应能力几乎如出一辙。拇指与食指可以实现完全拟人的捏取姿态,即使是斜向插拔这类空间受限的动作,也能找到最优的入刀角度。
作为灵巧手定位精度的硬指标,Flex 2的手指重复定位精度≤±0.1mm,关节重复定位精度≤0.4°,这保证了每一次落点的确定性。甚至,很难保证一名熟练的装配工人可以达到如此的重复操作精度。
但真正的分水岭出现在接触瞬间。
Flex 2的带载反驱技术能够赋能力位混合控制,这一设计优势直接体现在排线插拔的动作上。当排线接触接口的一瞬间,依托带载反驱技术,指尖在受力时能够单向被动柔顺应对外力,而不是机械地维持位置硬怼回去,从而给装置造成不可逆的损伤。
与此同时,指尖的微型力矩传感器以0.05N级的力控精度感知到接触力的变化,让手部“懂得及时收力”。整个过程可以说是手端本身就具备受力即顺应、接触即调整的本能。
巧,是它的手感。

(2)智:当元件开始滑移,谁来踩刹车
在插拔连接器时,由于元件表面光滑,指尖在用力推入的瞬间会发生微滑移。与此同时,操作空间极为紧凑,手掌周围密布着已安装好的电容、电阻和排线座,稍有不慎就会产生碰撞。
这是整场测试最难的一道应用题,也是Flex 2与传统机械手拉开代际差距的地方,它能够自主应对这种突发状况。
这种“智”,体现在一个完整的闭环中。
首先是,多模态感知融合的覆盖体系。
Flex 2集成了四类传感器,包括视觉(含深度)、触觉(指尖、指腹、手掌区域)、接近觉(掌心,LiDAR加红外)、力觉。它们按照空间距离进行了感知识别范围的一体化分工,构建起“远距离探测→近距离补盲→接触操作→力位协同微调” 的全链路感知体系,覆盖0-200cm抓取全区间,全链路无盲区。
当然,这个感知闭环只是数据链条的一部分。Flex 2在设计中还构建了完整的数据闭环通路,通过全流程硬件加软件的数据工具链,使得每一次真实工位上的灵巧操作经验都不会流失,而是沉淀为可复用、可训练的数据资产。

其次是,类人“小脑”的本能反射。这是Flex 2最具辨识度的技术特征。
人手在做精细操作时,很多调节并不经过大脑皮层。端热咖啡时杯子打滑、手指会下意识收紧,这个“下意识”便来自于小脑和脊髓层面的反射弧,速度在毫秒级。
Flex 2的设计逻辑与此同出一脉。它将控制决策的一部分直接下放至手端,构建了一套“反射库”,内置接触反射、防滑反射、柔顺抓握反射等本能反应机制,从而实现自适应抓握、滑移检测与柔顺反射。
回到场景中,当触觉传感器检测到连接器开始从指尖滑移,防滑反射便在毫秒级自动触发,指尖压力微调,滑移被扼杀在萌芽状态。整个过程不需要主控制器介入,不存在等上位机发指令的延迟。对产线而言,这意味着操作的鲁棒性不再依赖预设轨迹的准确度,而是有了在线感知和实时修正的安全余量。
最后是,开放开发生态。
硬件之上,Flex 2不是一个封闭的工具,而是一个面向开发者社群的通用平台。它支持OTA升级、开源操作数据集、兼容ROS系统,并配备完整的开发和仿真工具链。
智,是它的直觉。不用等大脑下令,手指自己知道该做什么。
(3)劲:用一根手指,把卡扣按到位
有了感知和本能还不够,产线上还需要精准的力控。
3C装配中有很多“定向施力”的需求。屏蔽罩的卡扣需要按压才能扣合,微小的螺丝需要旋拧到位。这些动作的共同特点是,只需要一根手指单独、精准地输出力道,而不需要整只手发力握紧。
Flex 2的四指指尖力≥15N,在关节力矩传感器的独立反馈下,Flex 2能做到用食指按卡扣的同时,其他手指保持松弛。
当需要整只手出力时,Flex 2同样有足够的储备,其单手抓取负载峰值12kg,持续作业负载额定4kg。既能搬运屏幕模组或金属中框这类有一定重量的部件,也能在完成搬运后回到精密工位继续进行微力操作。
劲,不是蛮力,是收放自如的指尖力道。

(4)美:当一只手离人很近的时候
这道题考的不是技术参数,而是人机关系的底层逻辑。
在工位上,操作员和Flex 2的活动空间部分重叠。此时,这只手的外形本身就是一种无声的安全语言。

Flex 2的仿人设计不是美学装饰。整手尺寸、关节位置比例、结构运动学链完全仿人,意味着它的运动姿态和意图更容易被人类操作员预判,降低了协作中的认知门槛和不确定感。
仿人指甲盖、黑白双色可选、多区域指示灯等人性化细节让状态信息一目了然。在产线上,信息透明本身就是一种安全策略。从视觉到触感,从交互安全到维护便利,这些设计构成了一个人机共生工位的完整答案。
美,是它的共情力。让技术有温度,让人愿意靠近。
(5)稳:7×24小时,精度如初
一道工序成功一次不难,难的是在连续七个、七十、七百个小时后,依然像第一次一样可靠。
产线上的可靠性没有模糊地带。Flex 2给出的是一组硬承诺。
100万次开合寿命,等效于高频操作下稳定运行一年以上;MTBF≥5000小时,是工业设备进入产线的基本入场券;腱绳抗蠕变设计,保证长期高频运作后,手指的收紧张力和运动精度不会越用越松。
但最见工程功力的,是主动散热系统,能够将表面温度控制在≤45℃。
很多人不理解散热对灵巧手为什么重要。长时间连续运行,热量在内部积聚,会导致材料热膨胀、传感器漂移、精度衰减,这是一个在实验室短时演示中永远暴露不出来的问题,却是在产线上一票否决的致命伤。
稳,是它的职业素养。从第一分钟开始,始终如一。

▍极致仿生,不是外形,是系统逻辑
六大维度拆解完毕,一个更深的问题浮现。这些能力是彼此孤立的优化,还是有一套贯穿始终的技术哲学?
答案是后者。Flex 2的产品思考可以用四层架构来概括,而其内核只有一个,那就是极致仿生。
硬件层的仿生,不是简单的“像人手”,而是整手尺寸、关节位置比例、结构运动学链的全维度参照。模块化设计使每根手指成为独立功能单元,支持单指拆卸与更换,与产线维护的真实需求无缝衔接。
更重要的是,Flex 2采用了全球首款混合驱动+自研自产方案,在同一只手上兼顾腱绳传动和直驱技术的优势。过去行业普遍只能在两条技术路线中二选一。要么选择柔顺性但牺牲部分响应速度,要么选择刚性但失去力控的细腻感。而Flex 2的混合驱动,从架构层面将两条路合二为一,实现了优势互补。

感知层的仿生,复刻的是人的递进认知方式,即在不同距离调用不同的感官。Flex 2构建的“视觉-接近觉-触觉-力矩传感”全链路感知体系,本质上是将这种递进式的空间认知方法工程化为一套覆盖0到200厘米抓取全区间、无感知盲区的系统架构。
控制层的仿生,核心在于决策架构的设计逻辑。Flex 2构建了一套类人小脑“反射库”,内置接触反射、防滑反射、柔顺抓握反射等基础本能,并为每一种反射定义了明确的触发条件。而混合驱动方案作为物理执行层的支撑,使反射指令能够被精准执行。此外,“小脑”布置在手臂内部、臂手控制运算尽量在端侧完成的设计,意味着从感知到执行的闭环无需绕路、无需等候。像人手一样,把本能还给手本身。
生态层的仿生,指向灵巧手的核心价值。人手的能力不是出厂即封装的,它终身学习、不断适应新任务。Flex 2的开放接口、ROS系统集成、仿真环境与算法工具包、OTA升级能力,是在试图将这种“终身学习”的能力赋予机械手本身,让它从一件硬件,变成一个可以随场景迭代生长的灵巧操作平台。
从底层硬件到顶层生态,从混合驱动的跨界决断到仿生逻辑的一以贯之,Flex 2代表的不是某一个技术参数的突破,而是一种产品哲学的落地,最终指向通用灵巧操作。
▍结语与未来
Flex 2这场精密装配的测试,已经给出了一个值得行业认真对待的答案。
当一只灵巧手像人手一样敏捷感知、像人手一样控制力道、像人手一样拥有本能反应,能在产线上稳定插好一根排线、感知一次微滑移、连续工作7×24小时不走样,它就开始具备改变制造方式的现实可能性。
真正的灵巧操作,是让那些至今仍要靠人手、靠师徒相传、靠日复一日经验积累才能完成的工作,终于有了可复制、可迭代、可规模化的工程承载。当然,这并不意味着灵巧手会成为人的替代者。
灵巧操作的意义在于将人从重复性的精密操作中解放出来,将精力投入更需要判断与创造的工作。如此来看,灵巧手本质上更像是人的延伸——让人的经验有了可复制的载体,让手感的极限有了可延展的边界。














