作者:Marilyn Liu 出品:具身纪元
2026 年 4 月 16 日,特斯拉提交的五份灵巧手专利。
提交日 2024 年 10 月 10 日,正好是特斯拉那场发布会,一个极富冲击力的灵巧手出现在展台上方。
这五份专利图纸摞在一起,那只号称代表特斯拉最高制造工艺的灵巧手,终于从零散的第三方解析被串联了起来。
虽然这不是一双完美的手,但是我们依旧能从中看到Optimus在灵巧手制造的核心理念和动机。
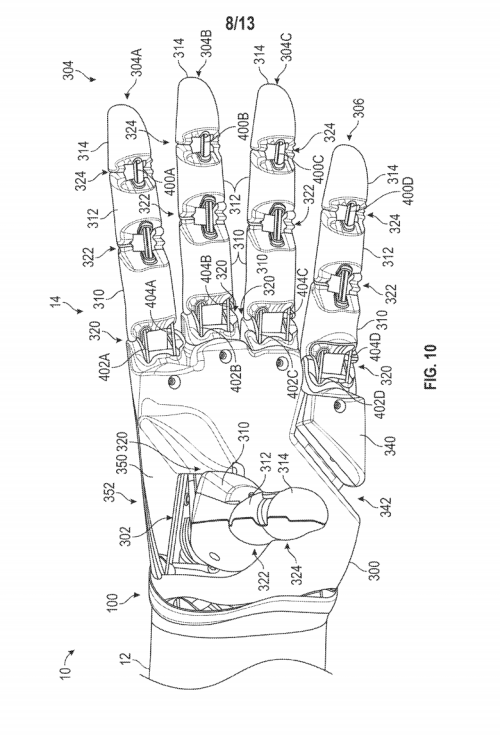
25个自由度,17根腱绳
25个自由度、22个手指自由度、17个手指执行器。这三个数字之间的,落差里藏着特斯拉的第一个工程小心思。专利中比较清晰地揭示出了特斯拉的自由度和控制逻辑。
这 25 个自由度全部由线性电动执行器驱动。每一个执行器的输出端,是一根能被电机推出去、拉回来的杆,连接着控制手指的腱绳。
手指的22个自由度是怎么分布的呢?
中间三根手指每根 4 个自由度,共计 12 个。主要由掌指关节(MCP)、近端指间关节(PIP)和远端指间关节(DIP)贡献。
MCP 指掌关节,负责2个自由度:屈伸 + 侧摆/外展内收
PIP 近端指间关节,负责1个自由度:屈伸
DIP远端指间关节,负责1个自由度:屈伸
相比中央三指,特斯拉为拇指(Thumb)和小指(Pinky)各增加了一个特殊的“对掌(Opposition)”自由度结构,使得这两根手指各拥有5个自由度,共计10个。

虽然特斯拉Optimus的灵巧手展示的素材很少,但我们也可以从国内同期起家的厂商的展示中窥见其中的原理。例如曦诺未来在去年年初推出的Flex1灵巧手产品也采取了25自由度、17根腱绳的设计方案,路线不谋而合
曦诺未来灵巧手自由度展示,对指测试,已加速
虽然手指有22个自由度,但是专利明确写到,写到执行器的数量只有17个
这是因为每个手指关节都装了一个被动复位机构(弹簧或橡皮筋)。执行器主动施加力的方向,全部用于弯曲、外展、内收(也就是抓握和打开手指的动作)。而把手指扳直、把张开的指头收回去这些反向动作,全部由关节里的被动复位件来完成。

根据Scott的分析,We robot放出来的灵巧手的视频,把这 17 根绳按功能分账,特斯拉自己用了一套四色编码:
红色 5 根是屈肌(flexion),负责让五根手指弯曲、握紧。蓝色 5 根是外展腱(abduction),负责让五根手指向两侧张开黑色 5 根内收腱(adduction),负责让五根手指向中线并拢。绿色 2 根——专属拇指,负责拇指的对掌和旋转。
机器人专家 Scott Walter 在对实物的逐帧拆解里指出了一个被很多人忽视的工程巧思:蓝色外展腱和黑色内收腱的固定点不在手指外侧最低位置,而是被特意拉高,固定到指骨上方。这样当外展腱和内收腱被同时拉动时,两个力矩相互抵消的同时,会沿着手指长轴产生一个朝下的合力——也就是手指闭合的力。
这意味着当手抓握物体时,红色屈肌、蓝色外展腱和黑色内收腱可以同时发力,三组执行器同时贡献握力。三倍的执行器力量叠加在一根手指上。
这是这个手设计中最聪明的地方。它让一只欠驱动(22 个自由度只用 17 个执行器)的手,在握力上反而比传统全驱动方案更强。
把不够的执行器数量,用力学耦合补回来。
手腕两个自由度的控制
特斯拉在腕部的设计非常的精细,背后的原因是特斯拉对手腕空间的极致考量。为了把电机放到前臂,特斯拉不得不让渡非常多的腕部空间用来走线。
WO 2026/080690 是专门针对腕关节的子专利:Wrist Joint for Robotic Hand,详细介绍了这一点。整个腕部两个连杆,中间一个万向节(universal joint),2个自由度,仅此而已。
而恰恰是这2个自由度,就可以实现类似于人手灵活转动的灵巧运动要求。
同期的曦诺未来展示手腕灵巧度
特斯拉的万向节结构中,俯仰轴和偏航轴上并没有直接安装独立的旋转电机。相反,控制它的动力来源于布置在前臂外侧的两个微型直线推杆(Linear actuators)。 通过复杂的次级连杆结构,系统实现了极为优雅的差动控制:
当两个推杆同向、等速伸缩(uniform actuation)时,合力会让万向节绕着俯仰轴旋转(手腕上下动)。当两个推杆一推一拉(differential actuation)时,合力会让万向节绕着偏航轴旋转(手腕左右动)。

专利原文万向节和两个推杆
这种方式意味着零件数减少、机械复杂度下降、重量更轻,同时还保留了两个自由度上的精确可控。
腕关节还有另一个微妙细节,特斯拉给手掌外壳特意挖了一个凹槽(notch),位置正好对着前臂方向。当手腕做最大幅度的背伸动作时,前臂上的支架会进入这个凹槽,给手腕多争取出十几度的运动范围。

凹槽
如果不挖这个凹槽,背伸到一半就会撞到前臂结构,运动幅度受限。特斯拉这次也想同时复刻人手关节角度的极限,这背后是亿万年进化过程中骨头形状、韧带长度、关节囊弹性反复试错的结果。
绳从这里穿过
手腕精巧的设置,其实是为了走线在让渡空间。毕竟要安顿17根绳子,这对线路的排布有比较大的挑战。
在空间设计上,特斯拉采用了悬臂式设计掏空出“腕管”。这是万向节设计中最具工程巧思的地方。传统的机器手腕如果在中心堆叠两个旋转电机,会把手腕堵得严严实实,导致控制手指的十几根腱绳无路可走,只能从外部绕行。 为了解决这个问题,特斯拉将万向节设计成了“悬臂式配置(cantilevered arrangement)”。万向节通过轴承偏置悬挂在支架上,从而在其正下方“掏空”出了一个宽敞的物理体积(在图中是volume 130)。这个留出的中空区域比作人类自身的“腕管(carpal tunnel)”,它专门用于让控制手指的密集腱绳群畅通无阻地穿过手腕过渡区,从而最大程度地减少了手腕运动对腱绳拉力造成的意外干涉(串扰/cross-talk)。
而腕关节会动,让腱绳的排布不再是放下这么简单。
腕关节会做两件事,一是上下俯仰(pitch),二是左右偏摆(yaw)。每一次手腕动作,理论上都会带动这 17 根绳跟着移动。
问题来了。
如果绳的走向偏离了关节旋转轴心,那么手腕一转动,绳的有效长度就会变化。绳长一变,对应手指的张力就变。
你只是想抬一下手腕,五根手指就跟着抽动了一下。这个现象在工程上有一个名字:crosstalk(耦合干扰)。
特斯拉用一份单独的专利来解决它:WO 2026/080687,标题 Mechanically Actuated Robotic Hand。
打开图纸看,这 17 根绳从前臂里出来时,先排成几层横向堆叠(lateral stack),就像一摞煎饼那样平铺;穿过腕关节中央的转换区域后,重新排列成竖向堆叠(vertical stack),变成一根根插针那样竖着排列。

为什么要这样转排列?
横向堆叠的目的是把绳缆紧贴俯仰轴心,让俯仰时绳不变长;竖向堆叠的目的是把绳缆紧贴摇摆的轴心,让 左右偏摆时绳不变长。
整捆绳像一队穿过门的人,进门时一字横排,出门时换成纵排。
转换的位置必须刚好处在两个旋转轴的相交点上,这样无论手腕做哪个方向的动作,所有绳的有效长度变化都被抑制到接近于零。
为了固定住线束的两个形状,特斯拉用了两个线缆支撑件。第一支撑件位于前臂侧,形成一个开口,所有线缆都从该开口横向穿过。第二支撑件位于手侧,起到纵向穿过线缆的作用。线缆穿过这两个支撑件,在它们之间改变形状,然后继续延伸到手指。
就这样,手腕动作和手指动作,被几何上彻底解耦。你抬手腕,五根手指完全不动;你弯手指,腕骨完全不变姿态。
专利原文也明确指出,通过将去往特定手指的腱绳进行极其严格的空间分组(分拨排布),这种排线方式专门为了“限制控制缆绳中的弯曲,并限制交叉的数量(limit the number of cross overs)
特斯拉给出的答案是用空间几何把它绕过去,靠机械布局直接消除这个误差源头,把这件事从控制算法那一端的负担里拿走。
把 25 个执行器塞进一根前臂
把 25 个执行器塞进一个尺寸接近人类前臂的圆柱体,这本身就是一道几何题。专利WO 2026/080691,标题 Robotic Forearm Assembly,是特斯拉对这道题的解法。
每个手指线性执行器直径在 10 到 30 毫米之间(实际方案约 12 毫米),腕部执行器直径约 20 毫米。换算一下,单个手指执行器的截面积只比一枚一元硬币略小。这意味着电机、丝杠、齿轮箱与推杆全部被压缩进一根 12 毫米直径的金属管里。
特斯拉是怎么做到的?它把传统机器人执行器的 90 度直角输出干脆取消掉。
传统的电机—丝杠组合,电机的转轴和最终输出杆的方向往往是垂直的,电机横过来安装、丝杠纵向输出,这样能用更短的轴向长度装下更大功率的电机。
特斯拉做了一次重新对齐:电机轴心、丝杠、推杆,全部沿前臂轴向同轴排列。电机自己变成了细长形状(无刷空心杯电机),整个执行器像一根细长的笔。
这种笔状执行器的好处是能高密度排列。
50a(第一子集 / 外圈执行器):外圈正好密密麻麻地排布了 16 个圆孔;50b(第二子集 / 内圈执行器);位于内圈,共有 7 个;52(Wrist linear actuators / 腕部执行器):内圈中明显比别人大一圈的两个圆孔(左右对称排布),专门负责手腕运动。16 + 7 + 2,完美的 25 根高密度阵列
专利描述了具体布局:前臂腔被分成外圈和内圈两层。外圈紧贴前臂壳壁,内圈靠近中心轴。外圈一圈横截面里能塞 16 根执行器,内圈再塞 7 根 执行器加 2 根腕部执行器,总共 25 根,全部沿前臂轴心方向同向。
每根执行器的远端(distal end)还故意做了轴向错位(axially staggered)安排,长短不一,最远的执行器比最近的多伸出几个毫米,这样 17 根输出杆从前臂出来时不挤在同一个截面上,给后续的绳缆终端留出空间。
内圈的推杆和外圈的推杆在轴向长度上是错开的。外圈推杆比内圈推杆更靠前,这种“阶梯式”的错位排布(专利段提及),是为了在极其有限的空间里,避免大家在连接腱绳时互相打架,进一步将空间利用到了极致。
有意思的是,根据行业专家的分析,在股东大会和 We Robot 发布会上展示的真实物理样机中,实际只安装了 17 个执行器:
外圈(底部/下环)
:只装了12 个执行器(比图纸少了4个)。
内圈(顶部/上环)
:只装了5 个执行器(比图纸少了2个)
我们不清楚到底哪个才是特斯拉认为更优的选择,到底是因为生产和走线难题,所以比设计的少了6个执行器,还是说他们认为需要放多个电机实现完全的全驱动才是最优解?
专利中还写了一个细节,所有执行器的电机控制板(PCB)、逆变器、传感器,全部内嵌在前臂壳体内部。整根前臂是一个除了电源以外不需要任何外部连接的独立单元拆下来一根,插上电源就能工作。
同样,我们也来看看国产玩家近似方案的示意。
无独有偶,曦诺未来的Flex1灵巧手从设计之初就选择了相似的方案,将20个左右电缸后置在前臂,并且据我们从行业调研的信息了解到,曦诺的前臂更细,最大臂围为85mm。这得益于他们自研自产的微型电缸、空心杯与丝杠技术。其中微型电缸中的核心部件空心杯电机直径为8mm,微型行星滚柱丝杠的直径仅为7mm。

曦诺未来执行器在手臂之中。

曦诺未来自研电缸产品图
把 25 根驱动器、对应的 PCB、逆变器、温度传感器全部塞进一个 380 毫米左右的圆柱体里,这是工业级别的封装艺术。
关节的连接
但让所有专利分析家最惊讶的,还不是前臂里的走线设计。是手指关节里的另一项激进设计。WO 2026/080693,标题 Joint Assembly for Robotic Appendage。
打开第一张图,你会看到一个完全不像传统机器人关节的东西。没有销钉。也没有铰链。
两节指骨之间,只有一片三明治结构的复合柔性件(composite flexible member),把它们粘在一起。
三层复合结构
具体来说,这个三明治结构是外层是两片 Shore 60A 硬度的弹性体(硅胶或丁腈橡胶),抗拉强度约 8.96 MPa;中间夹一层纤维或金属。可以是 Vectran 这种液晶聚合物纤维,也可以是镍钛合金(Nitinol),抗拉强度高达 895 MPa。
这三层各司其职。
弹性体层负责柔顺:被压缩时回弹、被拉伸时复位,给指节提供让它自然伸直的被动力;中间纤维层负责约束,抗拉、抗扭、抗剪。它把指骨的相对运动严格限制在一个自由度上,也就是滚动接触(rolling contact)。这种柔性件只允许两节指骨像两个齿轮的曲面那样相互滚动,不允许它们沿任何一个方向平移、扭转、或绕指骨长轴自转。
为什么不要销钉?其实有很多推测。传统的销钉式铰链有两个老毛病。
Scott认为一个原因就是铰链是怕灰、怕沙。一个工厂里干活的机器人手,每天都有粉尘进入关节,销钉和孔之间累积磨损,几个月就会松脱。
第二是冲击载荷,销钉本质上是一个剪切受力件,撞击时容易疲劳折断。专利原文明确提到,由不同材料层组成的韧带可以“软化对关节组件的冲击(soften impacts to the bodies of the joint assembly)”
同时,机器人手指内部需要布线,为指尖传感器供电,为触觉阵列传输数据,可能还输送用于散热的液体。这些线缆必须穿过每个关节,而销钉关节迫使它们绕道而行。绕行过程中,线缆会反复弯曲,任何反复弯曲的部件最终都会疲劳失效。
专利中还提到,关节柔性件中央夹层里还嵌了一条柔性印刷电路(FPC),专门用来给传感器布线。这条 FPC 被精确放置在弯曲中性面(neutral bending plane)上,也就是关节弯曲时既不被拉伸也不被压缩的那条线——这样无论手指弯多少度,FPC 上的零件几乎不承受应变。
另外一个更核心的点是,这种设计更加类似于人的关节与关节之间的耦合结构。从人体解剖学角度证实,人类手指内部确实没有销钉,而是“滚动接触关节(rolling contact joint)。

不知道是什么原因,特斯拉内部停止了这样的关节连接的研发。这也引人无限遐想,到底下一代手会采取什么样的技术路线。
为什么要设计成臂手一体?特斯拉到底怎么想
马斯克曾经说手和前臂的制造是极其困难的工程挑战,比机器人其他部分都更难。既然这么难,为什么特斯拉还要专注于臂手一体这个路线呢?
一切都是为了空间
从腱绳的控制、到腕管排布再到手臂的腱绳排布,这一切的设计其实都是为了更好利用空间。
怎么理解空间的重要性,我们以触觉举个例子。
特斯拉明确表示将采用电阻和电容式触觉传感器,且传感器并没有仅仅局限在指尖,而是广泛分布在手部结构的各个部分。
而要实现压阻或电容方案下的全手掌的高密度触觉感知,由于传感器点阵接口极多,其对应的处理算力板往往面积大且有一定厚度。特斯拉为代表的臂手一体方案,通过腱绳传动,将 17 个微型直线电缸全部后撤到了前臂内部。这就将手掌内部彻底“掏空”,触觉算力板可以轻松放置在手掌内(甚至设计成异形板),且由于手掌内没有电机,还完美避开了电机发热对算力板造成的热稳定性干扰
极致仿人
节省空间背后的动因,不仅仅是为了塞下更多的传感器,真正的原因是马斯克一直在坚持的第一性原理,极致仿人。特斯拉做的事,是把这套生物语法翻译成一份机械图纸。
马斯克为什么要做这个技术选择?回答这个问题,得先回去看看你自己的手。
把袖子挽起来,活动一下五根手指,再看小臂。你能摸到的那一团肌肉,从肘关节一直到腕骨,鼓鼓地撑满了整个前臂腔。这块肌肉群,就是负责让你能弯指,能握,能捏,能撕开一袋薯片的真正动力源。
手掌里有什么?很少。只有几块拇指鱼际肌,小鱼际肌,再加一些蚓状肌。这些肌肉的力量加起来,远远不够让你拎起一公斤重的东西。
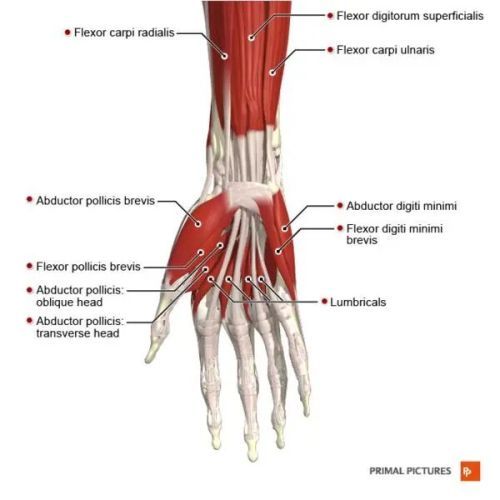
人手解剖图
人手强大的关键,在前臂,不在手心。
人体几亿年进化出这个分工。手掌作为受力末端,必须轻,惯量越小,加速越快,回弹越灵;但抓握时需要的力又必须大。前臂相对粗、相对稳定,把发力机构布在那儿,再用一根根肌腱把动力传过来,是几亿年试错之后的最优解。
如果电机全在手上,手掌会非常沉重(例如单手可能超过 1.2 公斤)。而臂手一体设计将沉重的动力源(电机)全部转移到了小臂内,使得重量重心大幅靠后。
手掌前端变得非常轻盈,末端惯量极低,也更类似于人柔顺的手部状态在与人交互中也更加安全。
由于手指上没有任何电机,这赋予了手指极高的瞬时加速度和移动速度。
为什么说特斯拉这版手不完美?
著名媒体Information曾经在去年报道过特斯拉手的进展,提到过热和磨损以及握力不足难以制造等问题。这批24年就提交审批的专利,大概不是最新版。
业内推测特斯拉灵巧手面临四大工程挑战:
一是缺乏主动伸肌,仅靠材料被动回弹导致手指在用力抓握时极易受力变形;二是狭小空间内的极限弯折使早期腱绳护套极易发生严重磨损;三是无销柔性关节的材质硬度易受温度影响导致传感器读数漂移,大幅增加了系统标定难度;四是腱绳寿命对过载高度敏感,迫使特斯拉在连接处设计“机械保险丝”作为物理断开保护,在受力过大时牺牲廉价连接件以保全昂贵电机。
这些客观的物理限制,可能正是马斯克坦言当前方案“行不通”的核心原因。
所以也有传言特斯拉在考虑技术路径的转向。
国内的曦诺未来也在尝试进行混合驱动方案的探索,下一代灵巧手Flex2将会在5月13号发布,结合腱绳+直驱,在灵巧性、负载与耐用性之间实现了更优的平衡。或许腱绳和直驱的技术路线之争并没有谁输谁赢,在这时候推出混合驱动的方案,着实让人眼前一亮。
中国厂商并驾齐驱
国内也有一些公司和特斯拉不谋而合,在同时期采用了和特斯拉相同的腱绳驱动,臂手一体以及执行器后置的公司。就如前文提到的曦诺未来,通过不断深耕腱绳技术路线,坚持核心零部件自研自产,是国内极少数具备“电机+电控+减速器+丝杠+算法”全链条自主研发与制造能力的机器人灵巧手玩家。
他们在腱绳手上有自己独特的思考。
为了应对伸肌缺失的痛点,曦诺未来每个关键关节嵌入弹簧机械缓冲结构,受到外部冲击时弹簧像人类肌腱一样做被动响应,在被动复位之外多一层主动吸能的安全冗余。
为了应对耐久性痛点,核心微型电缸 500 多万次老化测试、腱绳组件 180 万次寿命实验
应对编码器漂移和腱绳蠕变的痛点,公司通过多个传感器闭环监控,一代手每个关节都集成了角度编码器,对关节角的闭环控制精度可达 0.5 度。通过全闭环控制和多个维度的感知,降低了蠕变对系统的影响。
为了应对量产难题,公司自研 8 mm 直径无刷空心杯电机加 7 mm 行星滚柱丝杠(这是特斯拉 V2 暂时还没做到的关键工艺)组成的微型电缸,推力密度 5.2 N/g。已建成 5000 平米产线,2026 年第二季度投产,年底产能 1 万台灵巧手 + 20 万根微型电缸,万台订单已经在手。
三个月前刚完成数亿元 Pre-A 轮融资,京东领投,小米战投超额追加。
这似乎都在预示着,在具身智能、灵巧手这样的顶尖技术赛道,并非像原来一样,只有欧美玩家在引领风骚,我们国内的厂商也在技术路线、核心突破点上有自己的核心竞争力。

Xynova Flex 1 灵巧手
写在最后
把 25 个驱动器搬进前臂,这套方案是几亿年前人手就给出的方案。
特斯拉做的事,是把这套生物语法翻译成一份可申请专利的工程语法。这件事难就难在,每翻译一段,都会发现人体对应的细节比想象的多一层。缺一个伸肌,整只手就压不住反作用力;少一段护套结构,绳子极其容易磨断
这是把人体里那台已经运行了几亿年的执行器系统重新逆向工程,重新封装,再用工业制造体系造出来,这件事的难度,远远超过我们以为的。
V3 will be very special.
我们期待着。
以上,既然看到这里了,如果觉得不错,随手点个赞、在看、转发三连吧。
参考资料
特斯拉官方公开专利 (WIPO公开文件)
WO 2026/080693
:Joint Assembly for Robotic Appendage(核心:无销滚动接触关节设计)
WO 2026/080691
:Robotic Forearm Assembly(核心:前臂同轴微型电缸总成)
WO 2026/080690
:Wrist Joint for Robotic Hand(核心:手腕万向节与掏空腕管设计)
WO 2026/080687
:Mechanically Actuated Robotic Hand(核心:机械腱绳驱动系统与走线)
WO 2026/080701
:Robotic Appendage(核心:机器人附肢与全手掌传感器布局)
知名技术分析师 Seti Park 最早在社交媒体上对这批专利进行的深度挖掘与系列拆解线索:
线索 1:https://x.com/seti_park/status/2044824259634311425线索 2:https://x.com/seti_park/status/2045131852189688108线索 3:https://x.com/seti_park/status/2045384185754628488线索 4:https://x.com/seti_park/status/2045736679378657358线索 5:https://x.com/seti_park/status/2046429485705417075
海外专家硬件逆向拆解 (YouTube 视频搜索)
TESLA OPTIMUS PATENTS REVEAL A MASSIVE LEAP
(Over The Horizon 频道:机械专家与解剖学副教授的跨界硬核对谈)
Tesla Tried to Build the Perfect Robot Hand… It Didn’t Work
(Dr. Know-it-all 频道:详述被动弹簧关节与握力折损问题)
Tesla’s Optimus Is Finally Showing Its Hand: The Details Are Surprising
(The Humanoid Hub 频道:专利与实物的工艺对比妥协)