

9位清华博士以本能驱动打破VLA行业定式 完成近亿元种子轮融资
具身智能大讲堂获悉,橡木果机器人近日成功完成了近亿元的种子轮融资。在融资消息对外公布的同时,公司也首次披露了一套此前从未公开系统阐述过的具身智能技术逻辑,即“本能驱动”。
橡木果自正式完成注册成立至今尚不足一年半,但支撑这套技术逻辑逐步成形并最终确立下来的相关积累,实际上已经持续了九年。

在当前行业内多数公司仍然把重心放在VLA(视觉-语言-动作)路线上的背景之下,橡木果选择对外明确表态:操作智能以及语言智能,本质上原本就是两类彼此不同的问题。如果试图借助同一套方法论将其一并加以解决,那么这一方向从一开始就已经出现了偏差。
从电机领域走向神经科学:一场带有偶然性的跨界转向
要真正理解橡木果所选择的技术路线,首先需要把视线回到发起人姜峣的个人经历之上。
2016年之前,他在清华大学攻读机械工程博士,研究方向主要集中在传统机器人的力学机制以及操作控制方面。临近毕业阶段时,他逐渐意识到这一方向已经相对成熟,继续沿着这一路径做下去已难以带来更强的兴奋感,于是选择出国从事博士后研究,希望借此接触与前沿AI相关的内容。
在哈佛期间,姜峣所在实验室的研究核心聚焦于“人的行为”,重点考察视觉、触觉等感知能力会如何对操作行为产生影响。实验室持续设计各类实验,例如屏蔽视觉、干扰触觉以及人为制造感知偏差,并据此观察操作行为会如何发生变化。他逐渐发现,有些行为会随着感知条件的改变而改变,但也有一些行为无论受到怎样的干扰,都不会发生变化。
这使他进一步形成了一个在机器人领域并不占主流的位置的判断:操作能力在更大程度上更接近于一种先天本能,其背后存在相对固定的物理机制;而语言则恰好相反,如果没有外界教导,就不会自然获得说话能力,环境传递什么语言,个体就会习得什么语言,因此其形成过程高度依赖后天输入。正因为两者在底层逻辑上并不相同,如果试图借助大模型与大数据这一套方案同时把它们一并解决,那么最终就会在操作执行层面被卡住。

2018年回国之后,姜峣回到清华继续推进实验室建设,并开始系统开展“从本能出发的具身操作”研究。团队持续围绕几个核心问题展开追问:机器人是否具备“本能”?如果具备,那么这种能力应当以何种形式存在?在研究过程当中,他们逐渐发现,许多本能实际上是由触觉所驱动的,手在接触到尖锐物体之后会立刻缩回,这种由触觉刺激所触发的行为反射,既不依赖视觉,也不依赖训练数据。
PART 02
九位清华博士参与其中,历经八年的持续打磨,并始终把团队扩张节奏控制得极为克制,多年来基本保持每年只招收1人的用人标准。
橡木果当前的核心技术团队共有九人,其中包括发起人姜峣,即清华大学博士、哈佛博士后,以及另外8位清华大学博士。团队成员之间的年龄相差一到两岁,基本覆盖95后至00后这一年龄区间。自姜峣于2018年回国并在清华重建实验室之后,核心成员便陆续加入;到公司正式成立时,部分成员共同协作的时间已经超过数年,整体团队的积累也已超过八年。
在当前的具身智能赛道之中,这种组队方式并不多见。与其同期成立的多数初创公司,往往会在拿到融资之后迅速推进团队扩张,并借助高薪从大厂挖人;而橡木果所采取的做法则恰好相反,实验室过去基本保持每年只招收一名新成员,并且筛选工作早在学生大二阶段时就已经开始启动。
筛选标准主要分为两个层次。第一层考察能力:实验室对理论基础极为看重,许多成员在本科阶段就已经发表过论文。第二层则更为关键,即考察意愿:姜峣会投入较长时间与候选人交流,以判断对方是否真正愿意去做一件“可能需要十年才能看到成果”的事。最终能够留下来的人,通常都经历了至少一年的观察以及磨合。
进组还设有一道特殊机制:每当有新成员加入时,实验室原有的博士生都必须一致认可。其逻辑并不复杂,大家在未来需要长期背靠背地共同协作,因此相较于能力而言,信任关系往往更难真正建立。
姜峣对此有一句表达得很直接:“真正关键的并不在于招到了多少人,而在于这几个人之间是否已经形成了长期共同工作的信任关系。这种东西本身就很难被复制。”技术路线可以被模仿,专利可以被绕开,但一支已经完成八年磨合的博士团队,其所经历的时间积累却无法被压缩。
PART 03
首单500万:零数据冷启动之下的商业化验证
技术路线层面的争论,最终仍然需要落实到产品结果之上。
2026年,橡木果迎来了第一次商业化验证。客户来自一家全球头部的化妆品ODM厂商。由于化妆品行业存在频繁换产的特点,产品规格、包装形式以及摆放状态经常发生变化,传统自动化方案一旦遭遇换型,往往就需要重新进行调试。这家工厂此前已经接触过不少自动化团队以及具身智能公司,但相关效果始终不够理想。
橡木果接手之后,需要完成的任务,是让机器人对形状与材质各不相同的化妆品瓶罐进行抓取、旋拧以及放置。整个实际开发周期只有一个多月:过年期间完成签约,三月推进实施,四月完成POC验证,随后顺利拿到订单,金额突破500万元。
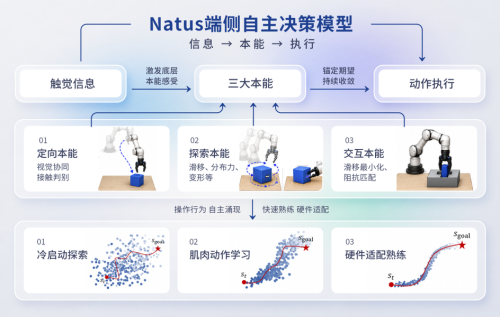
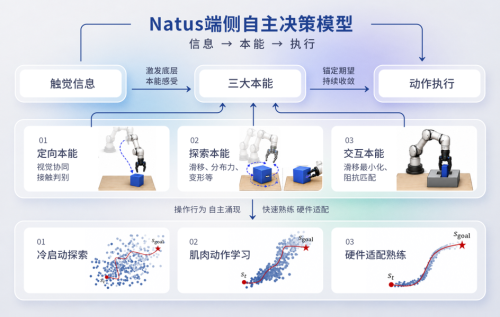
推进之所以能够如此之快,所依赖的正是Natus操作系统所具备的“零数据冷启动”能力,即无需提前积累场景数据,便可以直接在真实环境当中对操作任务进行适配。这一能力所针对的,也正是VLA路线最难真正绕开的核心问题,即对于数据的高度依赖。
姜峣团队曾进行过一次直接对比。针对同一个装配任务,他们借助VLA以及模仿学习的方法,在仿真环境当中训练了约十万次,随后再把结果迁移到真实环境之中。在工况保持稳定时,其表现并不差,在某些固定场景当中效率甚至更高;但一旦条件发生变化,例如孔径略微变小、更换一批零件,或装配误差出现轻微偏移,系统便开始变得不稳定,有时需要重新训练,有时则会直接卡死。相比之下,橡木果的系统在未运用该场景预训练数据的前提下,以零数据作为起点,在对方已经训练十万次的同一任务之上,依靠自主探索同样完成了操作。
选择工业柔性制造作为首批落地场景,而非当下资本热度更高的人形机器人赛道,姜峣的判断非常直接:标准化产线已经被传统自动化方案优化得较为成熟,能够进一步替代的空间相对有限;而柔性制造由于换产频繁、现有方案相对薄弱,才真正构成了“操作本能”得以发挥价值的关键场景。
PART 04
在外界质疑声音最为集中的阶段,往往也正是最值得进入的时点。
姜峣用了将近八年的时间才真正启动融资,这件事本身就值得进一步琢磨。在他看来,一项过早被暴露出来的技术判断,在市场共识尚未真正形成之前,往往只会被视作异类。
去年VLA热度处于最高点的时候,如果有人公开提出“操作智能和语言智能可能属于两种不同的问题”,几乎不会有太多人愿意认真听取。这并不是因为这一判断本身存在错误,而是因为资本早已重仓押注了另一条路径,因而没有人愿意在中途轻易回头。姜峣也曾直言,有些投资人“听懂了,但不太敢接受”。这句话背后的潜台词其实非常清楚:问题并不在认知层面,而在仓位层面。
但现在,时机已经到了。VLA在操作执行层面所暴露出的瓶颈,正在被越来越多的人清晰看到。无论是对数据的高度依赖、对场景变化较弱的泛化能力,还是工况只要稍有变化就可能迅速失效,这些问题在当前工程阶段都很难借助简单优化加以解决。至于它们是否已经构成路线本身的结构性缺陷,业界目前仍然没有形成定论。姜峣选择在这一时点对外公开,并不是在逆势而动,而是在等待一个行业共识正在松动、但新的方向尚未被率先占据的窗口期。“这个窗口不会太长”。
真正关键的问题在于,产业端的接纳逻辑从来都不是“哪一条技术路线显得更优雅”,而始终是“究竟谁能够率先稳定地跑通”。化妆品工厂的那个案例所说明的,恰恰正在于这一点:工业客户实际上并不关心你的技术哲学究竟是什么,他们真正会追问的只有一件事,即系统能不能实现7×24小时稳定运行且不出问题,以及整体成本能不能低于人工。“零数据冷启动”的价值,并不在于它在理论层面显得多么先进,而在于它把从签约到完成交付的周期压缩到了一个多月,而这恰恰是传统自动化方案以及VLA路线都难以做到的事情。
这才是橡木果真正的入场券。
但从这里继续往前推进,还有一个更大的考验正在等待着他们:单点层面的突破,能否进一步转化为体系层面的优势。
把抓取能力真正做扎实之后,下一个场景究竟应当如何完成迁移;触觉传感器在成本以及良率方面,能否对规模化部署形成有效支撑;当客户数量从一家进一步扩展到一百家时,系统稳定性又能否继续保持。这些环节当中,任何一处一旦掉链子,即便技术路线本身判断正确,也仍然会被工程化能力所拖累。
具身智能真正需要接受检验的商业化战场,始终在一条又一条产线的持续运转过程之中。如今的橡木果,正站在这道门槛之前,并且已经拿到了第一张入场券。
来源:9位清华博士用“本能驱动”打破VLA行业定式,拿下近亿元种子轮! | 机器人大讲堂














