英伟达Cosmos生态与机器人布局逻辑解读:物理AI的范式跃迁
当世界模型从「理解语言」进一步进化为「理解物理世界」之时,英伟达正借助一套完整的生态体系,重新定义机器人以及自动驾驶时代算力基础设施的角色定位。
但在这场宏大叙事之下,数据鸿沟、仿真精度以及商业落地之间所形成的张力,依然值得进一步深思。
01.
Cosmos 3:新的物理世界操作系统

6月1日,英伟达宣布,用户现可在Hugging Face上下载Cosmos 3,并依赖于GitHub上的相关资源对模型进行定制,同时生成合成数据。按照官方的表述,这一举动被界定为“在物理AI基准测试上取得了领先结果”,其覆盖视觉推理、图像生成、世界生成、物理精准度以及机器人动作生成五个维度。
但如果仅将其视为一次常规的模型迭代,大讲堂认为,这显然低估了英伟达所展现出的战略野心。
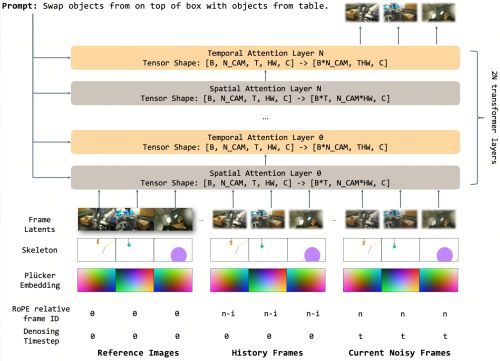
Cosmos 3的核心以NVIDIA混合Transformer(Mixture-of-Transformers)架构为基础,该架构把Transformer以及扩散模型(Diffusion Model)两条技术路线融合在一起:前者负责从指令、观察以及动作的混合输入中开展推理与规划;后者则由前者驱动,负责生成「接下来会发生什么」。这一双引擎设计,使Cosmos在本质上超越了传统意义上的视觉语言模型(VLM),成为一个能够在时序维度上感知、预测并生成物理世界的「世界模型」。
更为关键的是,英伟达为Cosmos赋予了四重功能定位。作为世界推理器World Reasoner,它可以从视频以及文本输入中理解场景并作出判断;作为世界模型World Model,它能够生成具备物理精准度的合成训练数据;作为仿真器Simulator,它可以在闭环环境中对机器人策略进行测试,展示动作结果并预测后续状态;而作为世界动作模型World Action Model,它甚至能够直接为不同的机器人本体生成动作指令。
这四重身份的并列共存意味着,Cosmos并非服务于某一单独环节的工具,而是支撑整个物理AI开发流程的基础设施层。英伟达的意图已相当清晰:其目标是成为机器人时代的「操作系统」,而Cosmos正是这一操作系统的内核。
02.

从VLM到世界动作模型如何演进
世界动作模型的出现,是否就意味着VLM会被取代?英伟达机器人业务负责人Spencer给出的回答,为理解当前AI架构如何演进提供了一个重要视角。
其逻辑在于,最初之所以以语言模型为起点,是因为语言构成了人类理解世界的语义接口,但机器人真正需要的并不是语言智能,而是空间智能以及动作智能。VLM结合动作头Action Head,便形成了VLA视觉语言动作模型;在这一基础上进一步加入对世界物理规律的建模,便形成了世界模型;最终,只有把视觉感知以及动作生成置于同等优先级并实现融合,才会得到世界动作模型。
这一路径的战略意义在于,它为英伟达的Omniverse数字孪生平台、Isaac机器人开发平台以及Cosmos世界模型三大产品线,构建了一个统一的技术叙事框架。开发者无论是进行仿真、训练还是部署工作,无论处于哪个环节,都可以在英伟达生态中找到对应工具,且这些工具之间具备清晰的协作关系以及数据流转逻辑。
这种从底层算力、世界模型以及开发框架所形成的纵向整合能力,也正在使英伟达在物理 AI 领域逐步形成具有行业影响力的全栈生态优势。
03.
数据鸿沟才是真正的「大挑战」
如果说世界动作模型这一概念令人感到兴奋,那么在现实层面,「数据鸿沟」Data Gap这一问题则会使人保持清醒。英伟达Spencer在会议中坦言,当前机器人领域所面临的最大挑战,依然在于无法对每一种长尾场景进行捕获。真实世界中的边缘情况,既无法在现实环境中被安全采集,又难以在仿真环境中得到精确还原。
针对这一核心矛盾,英伟达给出的答案是「Omniverse与Cosmos的共生」。这一判断既体现出务实性,也带有一定的微妙性。因为Omniverse代表的是基于物理引擎的精确仿真,能够为特定场景提供具有物理依据的数据;Cosmos则借助预训练来学习物理动力学,能够生成大规模且多样化的场景。两者并非替代关系,而是形成了分工协作:Omniverse提供「物理锚点」,Cosmos提供「规模扩展」。
但其中仍存在一个尚未解决的深层矛盾:Cosmos模型的物理精度,在很大程度上仍受制于预训练数据的覆盖范围。典型例子便是精细操作任务,例如电子产品精密装配所要求的物理精度,当前的世界模型仍未完全达到。Spencer直言:「我们没有足够的、已完整标注且覆盖所需技能与交互类型的预训练数据。」
这意味着,在高精度操作场景之下,开发者仍然必须依赖于传统仿真器Omniverse来生成物理精确的训练数据,再把这些数据喂给Cosmos,以补充其物理先验。这本质上是一个循环依赖结构:Cosmos需要借助Omniverse所生成的数据来提升物理精度;而Omniverse的数据生产效率,又需要依赖Cosmos的泛化能力来扩展场景多样性。
这种共生关系在短期内仍难以被打破,但也恰恰构成了英伟达生态的护城河:两套系统之间的深度耦合,会使开发者很难只选用其中之一,而放弃另一套。
04.
把人形机器人的研究权还给大学
在英伟达本次发布的硬件产品之中,最具话题性的,是其与Unitree合作推出的参考人形机器人Unitree H2 Plus。
这款机器人身高约1.8米、体重约68公斤,搭载本体计算平台NVIDIA Jetson Thor,预装1.7版本的机器人模型,配备Sharpa五指灵巧手,并集成RGB摄像头以及腕部传感器。
同时,英伟达宣布推出 NVIDIA Isaac™ GR00T 人形机器人参考平台,这是首款以 NVIDIA Jetson Thor™ 以及 NVIDIA Isaac™ GR00T 开放开发平台为基础打造的开放人形机器人参考设计。
英伟达真正的战略意图,并不在于亲自制造机器人,而在于把顶级人形机器人研究平台的准入门槛进一步降低。Spencer的表述直白且有力:「把机器人研究从少数富有AI实验室的专属,交还给全球所有大学研究者。」目前,斯坦福、苏黎世联邦理工、加州大学圣地亚哥分校以及艾伦人工智能研究所,均已宣布选用该平台。

这一举措背后的产业逻辑十分清晰:当更多大学研究团队基于英伟达的人形机器人全栈开发平台Isaac GR00T开展研究时,就会有更多模型、算法以及数据在英伟达生态中持续生长;而这些成果又会反过来加快Cosmos预训练数据的积累过程,从而填补上文所提到的「数据鸿沟」。学术生态的开放,本质上是英伟达对自身数据飞轮所进行的战略性投资。
目前,Unitree H2 Plus的商业化路径是借助海外分销商来推进,定价信息尚未公布,且预计将于2026年底面向商业客户开放。这意味着,至少在未来一年之内,该机器人仍会以研究用途作为主要应用场景,英伟达并未急于把其推向大规模商业部署。这种克制姿态,恰恰体现出其一贯坚持的「平台优先」而非「硬件优先」的战略取向。
05.
结语与未来
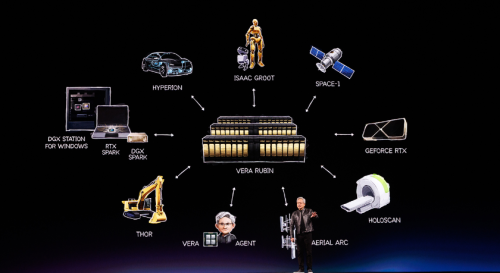
纵观英伟达围绕Cosmos、Isaac GR00T平台等方向所展开的整体布局,一条清晰的战略主轴已经浮现:英伟达正把自身从「AI芯片供应商」转型为「物理AI基础设施提供商」。其所出售的已不再只是GPU,而是一整套覆盖数据生成、模型训练、仿真验证以及边缘部署等环节的完整工作流。
这一战略能否取得成功,在很大程度上依赖于生态所形成的网络效应:越多的开发者借助Omniverse生成数据,越多的研究者在Isaac平台上训练模型,以及越多的工厂在Fox框架下部署代理,Cosmos数据飞轮的运转速度就会越快,英伟达技术护城河也会随之越深。
但生态锁定本身是一把双刃剑。对于产业链上的参与者而言,深度接入英伟达平台所带来的不仅是效率的提升,还有持续累积的依赖风险。当「Cosmos成为行业基线」逐渐成为共识,当「Isaac GR00T成为人形机器人开发标准」,这些产业参与者未来必然会在一定程度上被深度绑定于英伟达生态之中。
更值得关注的是,英伟达所推进的这一系列布局,最终都建立在一个前提之上,那就是其能够持续维系算力层面的技术优势。一旦替代性芯片架构在性能方面形成实质性的竞争,当前以GPU算力作为锚点所构建起来的整个生态体系,都会面临被重新定价的压力。
物理AI时代正在加速到来,英伟达围绕Cosmos所构建的生态,或许已是当下最完整、最系统的一套布局。但从「最完整生态」走向「最终胜出」,其间的距离从来不是由技术路线图所决定,而是要由真实落地中的每一个细节来丈量。未来究竟会如何,人类仍在持续探索,而英伟达则已经给出了自身的路线图。
来源:物理AI的范式跃迁?英伟达Cosmos生态和机器人布局逻辑解读 | 具身研习社