


当宇树H2人形机器人在舞台上踏着精准的节拍翩翩起舞,当智元G2的灵巧手沉稳地拉开弓弦,公众的赞叹往往聚焦于算法与控制工程的精妙。然而,在这些优雅“拟人姿态”的背后,一场关于底层数据生产方式的静默革命已然发生。





作为这场革命的深度参与者,青瞳视觉(CHINGMU)日前正式发布的多模态高质量具身智能数据采集系统 Project Decode,或许标志着具身智能的竞争焦点,正悄然倾斜到对高质量、结构化真实世界数据这一核心生产要素的系统性掌控。
机器人大讲堂发现,如果说,动捕技术在过去更多扮演着人形机器人“教练”与“考官”的角色,那么Project Decode的正式推出,则清晰地展现了青瞳视觉更大的雄心:它意图构建一个具身智能时代的数据基础设施,为具身智能提供规模化、可复用、可迁移的真实训练数据,并从源头定义何为“可用、好用、通用”的训练数据。

因此,Project Decode构建的不仅是一套采集设备,更是一套数据生产标准与服务体系。这一体系若能在具身智能的关键发展窗口期内完成规模化落地,将在整个产业链中占据独特的基础设施位置。
01.
从能捕捉到能用,数据采集的认知鸿沟
机器人的进化,从数据开始。而数据的质量,从采集方式决定。在深入了解Project Decode之前,有必要先厘清一个常见的认知误区:“能采集到数据"和"采集到可用的数据”,是两件截然不同的事。行业中对于高质量、高精度、多模态真实交互数据的匮乏,目前依然是制约机器人运动控制、精细操作突破的关键瓶颈。





目前业内主流的数据采集路径大致分为仿真合成数据、单模态真实数据、多模态协同采集三类。三者各有优势和弊端。例如缺点合成数据往往存在与真实物理规律的系统性偏差,尤其在接触力学、材质响应、光照变化等维度,仿真数据往往无法真实反映现实。而单模态真实数据的泛化能力受到严重制约。多模态协同采集往往缺乏时空对齐,数据之间存在时间漂移,多模态数据不仅无法形成有效关联,甚至会引入噪声,反向干扰训练效果。





Project Decode要解决的,正是上述三类问题中最难啃的那一块,即在真实场景中,实现多模态数据的高质量、时空对齐、低噪声采集,并免去人工清洗时间,单人即可完成在正常工作流中同时进行数采、录制的工作,从而以近乎“零清洗”的状态直接输入AI训练管线。
Project Decode还在产品定义中明确强调了数据的“可迁移性”,其采集后的数据通过标准化格式与接口,支持迁移至市场上主流品牌的不同型号机器人。这背后是Project Decode通过参数化的运动学表达方式,能将人体动作数据与特定机器人构型解耦,使同一套采集数据能够通过重定向算法适配不同的目标机器人。这意味着,在Project Decode框架下积累的数据,具备更高的复用价值和更长的生命周期,其作为数据资产的价值密度,显著高于传统绑定特定硬件的采集数据。
02.
定义“高质量”数据新标准
行业早期,受限于采集成本与效率,大量具身智能算法,尤其是灵巧操作模型,高度依赖仿真环境生成的数据。然而,仿真与现实之间那道被称为“Sim-to-Real Gap”的鸿沟,始终是制约机器人泛化能力的阿喀琉斯之踵。仿真器难以完美复刻真实世界的摩擦系数、接触力学、环境光照以及人类的操作直觉与随机应变。

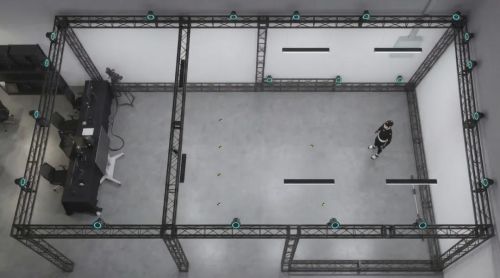
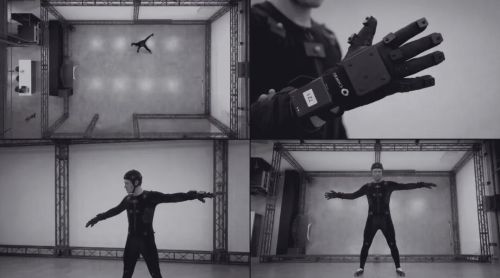
Project Decode给出的答案直接且硬核,即将高精度采集系统轻量化、场景化,推向真实的生产与生活一线。其提出了“真实场景伴随式采集”这一新模式。这并非在实验室中模拟一条产线,而是将轻至105克的光惯融合手套PulseH、即插即用的Pulse3 四目动捕相机带入真正的工厂车间。
这种能力使得采集工人操作时的肌肉记忆、指尖的微妙力度变化、应对突发状况的补偿动作成为了可能。这些蕴含了人类经验与智慧的“暗数据”,是任何仿真器都无法生成的,它们构成了具身智能走向实用的关键密码。Project Decode此举,本质上是在推动行业共识的转变,即高质量的真实数据,不是仿真的补充,而是决定模型能力上限的核心燃料。
此外,过去我们谈论动捕数据,往往局限于空间中的刚体运动轨迹。但人类完成“拧螺丝”这个简单动作,至少融合了实时视觉反馈、指尖触觉感知和多关节运动控制。这就要求训练一个具备同等能力的机器人,其输入的数据必须是复合的、同步的。
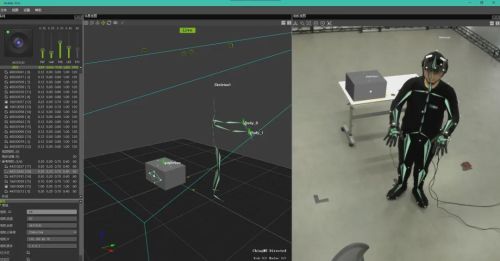
Project Decode定义的“多模态”,精确切中了这一需求。它不满足于采集动作信息,而是将触觉、视频、刚体、人际交互等数据等统一纳入采集范畴。但这只是第一步,更关键的技术挑战在于“时空对齐”。系统通过主控单元PulseC将多源异构数据统一到微秒级时间戳下,并实现同步时空对齐输出,完成了动作、力度、视觉的精准耦合。
设想一下,当机器人的视觉识别到螺丝,其手部动作规划到位,此时触觉数据(压力值与分布)恰好与指尖接触瞬间在时间轴上严丝合缝,这种精准匹配的数据,才能教会机器人何为“恰到好处的抓握”。这种端到端的、时空强关联的多模态数据流,极大降低了后续算法训练的数据清洗与对齐成本,直击研发效率的痛点,也树立了判断数据集质量的新标尺。
从更宏观的视角来看,这种伴随式采集以及集中售卖的模式潜力还远不止于此。如果这一模式能够在制造业、物流、医疗等多个行业规模化推广,实际上就构建了一条将人类工业操作经验持续转化为机器人训练数据的“数字化管道”。这条管道的价值,随着接入场景的增多而呈现出网络效应,每一个新的真实场景,都在为整个具身智能生态贡献新的数据多样性。
03.
底层技术架构的代际跃升
机器人大讲堂认为,Project Decode技术内核的光学与惯性“紧耦合”方案,更是代表了动捕技术路线的一次代际跃升。

在我们此前的报道中,青瞳视觉CEO张海威先生将“松耦合”比作“各自打分再取平均”,而“紧耦合”则是“专家会诊”。这一比喻精准揭示了二者的本质区别。
传统的“松耦合”方案中,光学和惯性系统各自独立解算位姿,最后进行融合,这使得惯性系统的累积误差和光学系统的遮挡丢数据问题被简单叠加。而Project Decode的“紧耦合”方案则深入到底层,直接调用光学的原始像素信息和惯性的加速度、角速度原始数据,通过算法实现迭代互校。
当光学被短暂遮挡,惯性数据提供连续的位姿估计,但其漂移趋势被之前光学定位的精确信息所约束;当光学因反光产生噪声,惯性数据又能提供平滑的滤波参考。尤其是其首创的无磁力计方案与主动发光编码Mark点设计。无磁力计方案从根源上杜绝了工业环境中无处不在的电磁干扰问题;而主动编码光点则让每个标记点都有了数字“身份证”,即便在金属、玻璃等强反光环境下,也能被稳定识别,将传统方案需要十几台相机才能完成的复杂手指捕捉,降低到仅需1-4台。
这种硬件层面的大幅精简,直接降低了部署门槛和成本,使得在狭窄的工位、家庭厨房等复杂场景中快速搭建采集环境成为可能,也是伴随式采集得以实现的技术保障。这意味着,在Project Decode框架下积累的数据,具备更高的复用价值和更长的生命周期,其作为数据资产的价值密度,显著高于传统绑定特定硬件的采集数据。
04.
重构数据产业链
如果说产品技术的突破是精兵,那么商业模式与服务体系的创新则是后盾。青瞳视觉告诉机器人大讲堂,其目前还提供企业级数据采集与后处理一体化服务以及数据库售卖,希望将高昂的动捕硬件投入和复杂的流程管理,转化为企业可预测的、按需付费的运营成本。
对于绝大多数机器人初创公司或研发团队而言,自建一条高质量数据产线的投入产出比极低。Project Decode的服务模式,实质上是将数据采集这项专业工作进行了社会化大分工:由青瞳视觉这样的专业基础设施服务商,集中投资、打磨工艺、保障质量,向全行业输出标准化、可复用的数据“原料”。
这不仅能显著加速各家算法模型的迭代周期,更关键的是,它推动了“数据集”作为独立资产的流通与复用。因为其强调的“支持跨平台迁移”特性,意味着同一批高价值操作数据,理论上可被应用于宇树、智元或任意一款符合接口规范的机器人本体进行训练,打破了“一机一数”的孤岛效应,让数据价值实现最大化释放。
05.
结语与未来
Project Decode的发布,恰逢具身智能从实验室Demo,迈向产业现场规模化落地的关键转折点。它不再仅仅是一个被动的记录工具,而是开始主动参与定义何为有效的训练数据,以及如何高效地生产这些数据。它所代表的,是从“模拟仿真主导”到“真实世界驱动”、从“单模态动作捕捉”到“多模态时空对齐”、从“孤岛式自建产线”到“社会化按需服务”的范式三重跃迁。








当行业的目光不再只盯着模型参数的多寡与算法的精巧,而是开始向下扎根,深耕数据这一泥土时,具身智能才真正拥有了从“能歌善舞”走向“能工巧匠”的坚实基础。或许,未来当我们回顾人形机器人融入社会的历史进程时,Project Decode这类系统的意义,将被定义为为机器人的物理智能安装了第一个标准化、规模化的“数据引擎”。
因为它揭示了一个朴素的真理:机器人的智慧不仅源于代码,更源于它对所栖居的物理世界,拥有了真正高质量、结构化、可理解的感知与记忆。而这,正是具身智能走向通用化的必经之门。












